H-IIAロケット6号機固体ロケットブースタの探索結果について
宇宙航空研究開発機構
本日開催された宇宙開発委員会調査部会において、下記のとおり報告をいたしました。
1. 探索経緯
平成15年11月29日のH-IIAロケット6号機打上げ失敗の原因究明の一環として、固体ロケットブースタ(SRB-A)の回収の可能性を検討するため、海洋科学技術センター(4月より独立行政法人海洋研究開発機構)から専門的助言及び技術指導(第一次から第三次探索作業の探索船への乗船を含む)等の協力を得て、次の通り探索作業を実施してきた。
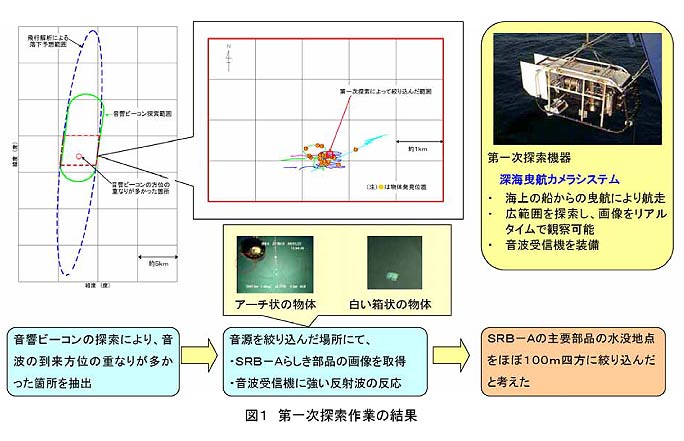
(1)第一次探索作業(平成15年12月31日〜平成16年1月1日、平成16年1月5日〜7日、1月16日〜1月21日)
SRB-Aには着水後から音波を発信するように設計された音響ビーコンが装着されており、当機構が準備したビーコン探査用音波受信機を6,000m級深海曳航カメラシステム(ディープ・トウ)に装着し、船舶にて曳航して音響ビーコンの探索を実施した。
2ヶ所(南側及び北側)の海域から音響ビーコンと思われる音波が確認され、当該海域にはSRB-Aと同様に音響ビーコンを搭載した第1段ロケットが水没しており、解析によりSRB-Aが第1段ロケットより遠くへ(南側へ)落下すると考えられることから、南側にSRB-Aが水没していると推定した。南側の海域について引き続き探索作業を実施し、以下の結果が得られた。
- 様々な位置で観測された音響ビーコンから発せられたと推定される音波の到来方向の角度から、それぞれ音源の位置を計算し、その位置をプロットしたところ、重複している範囲が認められた(音源の絞込み)。
- 音源が絞り込まれた範囲についてカメラによる探索を実施したところ、不鮮明ではあったがSRB-Aの関連部品らしき物体の画像を取得した(別添)。
- 同時に、ディープ・トウに搭載した音波受信機から発した音波の反射波により海底の物体の大きさや位置を判別する探索を実施したところ、大きな物体の存在を示すような強い反射波の反応が見られたので、当該海域は解析によるSRB-Aの落下地点に近いこと、船の航行が殆ど無い場所でありSRB-A以外の部品が落ちている可能性が低いと予想されたことから、SRB-Aの主要部品の水没地点の範囲がほぼ100m四方に絞り込まれたと考えた(図1)。
上記の100m四方の範囲を更に絞込むためには、海面から約6,000m下のディープ・トウの水中位置を正確に測定する必要があるが、第一次探索時に準備した測位システムの精度上、これ以上の絞り込みは困難であることから、海中を自力で航行できる水中ロボットを使用した探索に切り替えることとした。
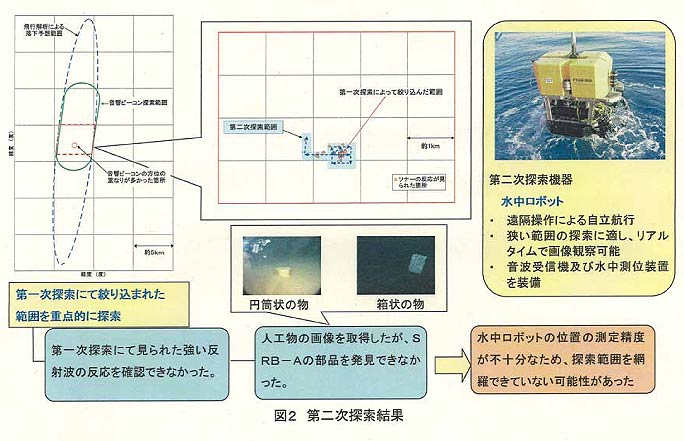
(2)第二次探索作業(平成16年2月20日、21日、27日〜3月2日)
国内では深度6,000mにて使用可能な水中ロボットが無かったことから、米国フェニックス社所有の水中ロボットに当機構が準備した音波受信機及びノルウェー製水中測位装置を追加装備して、第一次探索作業で絞り込んだ箇所を重点的に探索した。第二次探索では、2月20日からビーコン探査用音波受信機による探索を実施したが、音響ビーコンの音波を受信できず、音響ビーコンの寿命が切れたものと考えた。このため、音波の反射波による探索に切り替えたが、第一次探索時に見られた強い反射波の反応を再確認できなかった。また、カメラによる探索にて幾つかの人工物の画像を取得したが、第一次探索において画像を取得した物体は確認できなかった。ただし、第一次探索で取得した画像に類似した物体の至近距離からの画像を取得したが、ロケットの部品ではなかった(図2)。
使用した機材は、探索深度が仕様上のほぼ限界深度であったことから、通信装置、水中測位装置等に相次いで不具合が発生しており、水中ロボットの位置検出が不正確なために必要な捜索範囲を網羅できていない可能性が否定できなかった。当時、我が国で深度6,000m級の運用実績のある海洋科学技術センター所有の有人潜水調査船「しんかい6500」の定期整備が完了する状況にあり、訓練潜航が計画されていたことから、その機会を利用して「しんかい6500」による探索に切り替えることとした。
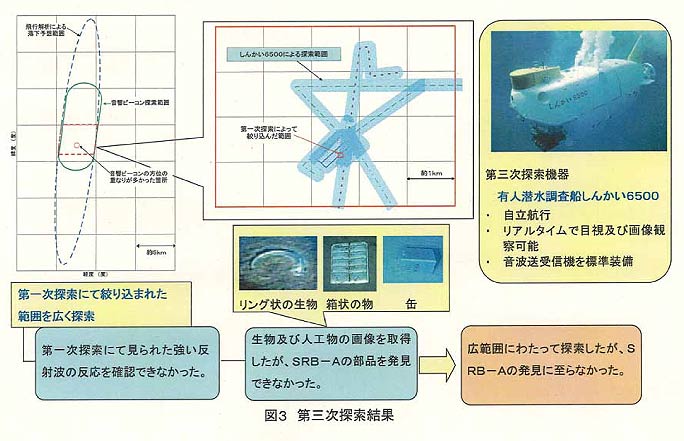
(3)第三次探索作業(平成16年3月22日〜3月26日)
「しんかい6500」の訓練潜航機会を利用して、第一次探索作業で絞り込んだ箇所を中心に広い範囲について探索作業を実施した。
「しんかい6500」には音波送受信機が搭載されており、周囲約150mの範囲について音波の反射波による物体の探索を実施することができる。また、「しんかい6500」の搭乗員による目視探索及び搭載されたビデオカメラによる探索が可能である。さらに確実に探索範囲を網羅するために、海底に通信中継器(トランスポンダ)を設置し、水中測位精度の向上を図った。
「しんかい6500」による探索の結果、音波送受信機に物体らしき反射反応が幾つかあったものの、近付いて目視及びカメラにて確認すると海底の地形の起伏や小さな人工物(灯油缶等)であり、第一次探索時に確認された強い反射波の反応は見られなかった。
また、「しんかい6500」の目視及びカメラによる探索にて、直径70〜80cm程度の半円状の生物が見つかり、その他にも人工物(箱、ロープ、袋等)や生物が見つかったが、第一次探索において画像を取得した物体やSRB-A関連部品は発見されなかった。また、取得データ(音波送受信機のデータ、動画、スチール写真)を詳細に解析したが、SRB-A関連部品は発見できなかった(図3)。
| 3月15日 | 那覇港出港 |
| 16日〜19日 | 熱帯低気圧による海況不良のため、迂回して回航 |
| 20日 | 測位精度向上のための通信中継器(トランスポンダ)設置 |
| 21日 | 海況不良により待機 |
| 22日 | 第1回潜航(探索) |
| 23日 | 第2回潜航(探索) |
| 24日 | 第3回潜航(探索) |
2. 探索結果の評価
第一次探索時に「音源を絞込んだ海域」について詳細な探索を行い、「SRB-Aの部品らしき画像が取得され」、かつ「音波受信機にて強い反射波の反応が見られたこと」等から、SRB-Aの主要部品の水没地点の範囲がほぼ100m四方の範囲に絞り込まれたと考えた。しかし、第二次及び第三次探索にてSRB-Aの部品の発見に至っておらず、その要因として、それぞれ次のことが考えられる。
- 音源を絞込んだ範囲が正確ではなく、本来の場所からはずれていた可能性が推定される。
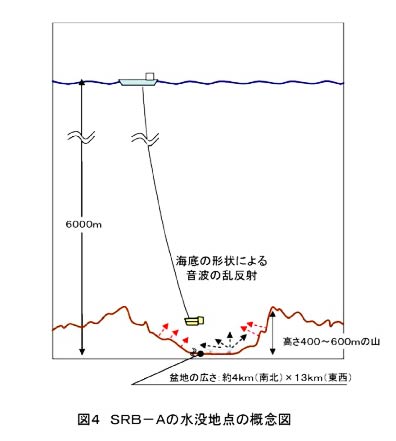
(a)第一次探索においては、海底が高さ400m〜600m の山で囲まれた盆地状の地形であったため固体ロケットブースタに装着されている音響ビーコンからの音波が乱反射したこと等により音源の絞込みの誤差が大きくなった。また、第二次探索においては、大深度の探索のため機材の故障の頻発等により音響ビーコンの寿命が切れる前までに十分な計測を実施できなかった(図4)。
(b)第一次探索時では、大深度に対応した外国製の水中測位装置がスケジュールの都合上準備できなかったため、船に装備されていた3,000m級の水中測位装置を曳航用のロープの途中に装着する代替の測位システムとしたが、水中のディープ・トウの位置を正確に検出できなかった。 - 第一次探索において、ソナーにより捉えた大きな物体の反応は、海底の地形の盛り上がりを検知したか、もしくは、曳航体(音波受信機)の姿勢のふらつきにより、実際より大きな物体として検知した可能性がある。
- 第一次探索において取得した固体ロケットブースタ関連部品らしき物体の画像は、曳航している探査機から撮影した不鮮明な画像を固体ロケットブースタ関連部品と推定していたが、第二次、第三次探索の状況から、実際は類似の人工物や生物であったり、あるいは陰影の違いが人工物に見えた等の可能性があり、再度確認することが困難であったと推定される。
3. 更なる探索についての考え方
調査対象海域の海底の地形、深度などの状況等を踏まえ、海洋研究開発機構(旧海洋科学技術センター)の専門家と協議した結果、以下の何れの方法についても技術的な問題等があり、これ以上探索しても固体ロケットブースタのノズル部を発見できる可能性は極めて低いため、JAXAとしては探索を打ち切ることとする。- 音響ビーコンによる音波の探索
SRB-Aに装着された音響ビーコンの寿命(90日間)が平成16年2月末に切れているため、音響ビーコンによる探索はできない。 - 音
波送受信機から発せられた音波の反射による探索傾斜や100m程度以上の起伏がある所では音波が届かない範囲が増えるため、この海域の地底にある高さ400〜600mの山及びその裾野の範囲をくまなく探索することができない。 - カメラによる探索
カメラの視野が狭い(5m程度)ため、広範囲を探索することは現実的には不可能に近い。
|
|
宇宙航空研究開発機構 広報部
TEL:03-6266-6413〜6417
FAX:03-6266-6910