「はやぶさ」地球スイングバイの実施と結果について
平成16年5月26日
宇宙航空研究開発機構
本日開催された宇宙開発委員会において、下記のとおり報告をいたしました。
■「はやぶさ」の概要
第20号科学衛星(MUSES-C)
|
 |
■はやぶさの技術実証要素
(1)イオンエンジンを主推進系とする惑星間の航行(2)光学情報に基づく自動着陸を含む自律的な航法・誘導・制御機能
(3)微小重力下における表面試料の採集
(4)惑星間飛行からの直接地球大気圏再突入による試料回収
■はやぶさの軌道
■スイングバイの概要
イオンエンジン+スイングバイ 併用した技法は世界初
- 地球最接近 5/19 15:22(日本時間)、東太平洋上空 高度3700km。
- スイングバイにより太陽周回軌道速度30km/s→34km/sに加速。
- カリフォルニア工科大学ジェット推進研究所(JPL)から軌道決定の支援を受けた。宇宙科学研究本部の軌道決定値とはきわめて正確に一致。JPLから実施の精度に賞賛の評価。
- スイングバイ時、地球の夜側を通るため、30分間の「日陰」を経験。本格的なバッテリ運用を実施した。宇宙機用リチウムイオン電池の搭載は日本初。
- 航法・理学観測用の搭載カメラ3台(望遠1、広角2)および近赤外線分光器により、月や地球を撮影。装置の較正と性能評価試験を実施した。
■スイングバイの実施状況
|
 |
|
|
■はやぶさ ミッション達成度
地球スイングバイ成功 → 150点達成
| 電気推進エンジン 稼動開始 (∵3基運転は世界初) | 50点 |
| 電気推進エンジン 或る期間(1000時間)稼動 | 100点 |
| 地球スイングバイ成功 (∵電気推進+スイングバイは世界初) | 150点 |
| (自律航法に成功して)小惑星ITOKAWAとランデブー成功 | 200点 |
| 小惑星の科学観測成功 | 250点 |
| 小惑星にタッチダウンしてサンプルを採取 | 300点 |
| カプセルが地球に帰還、大気圏に再突入して回収 | 400点 |
| 小惑星サンプル入手 | 500点 |
■写真1:地球(5/18 距離30万km)
(望遠カメラで撮影)
■写真2,3:月の画像
(望遠カメラで撮影)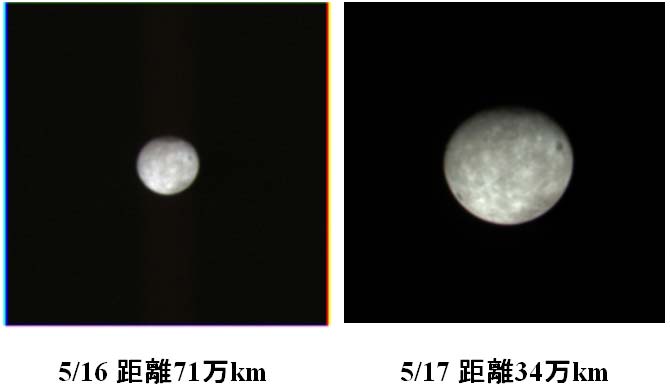
■写真4:地球(5/19 午後3時頃,日本上空)
(望遠カメラで撮影)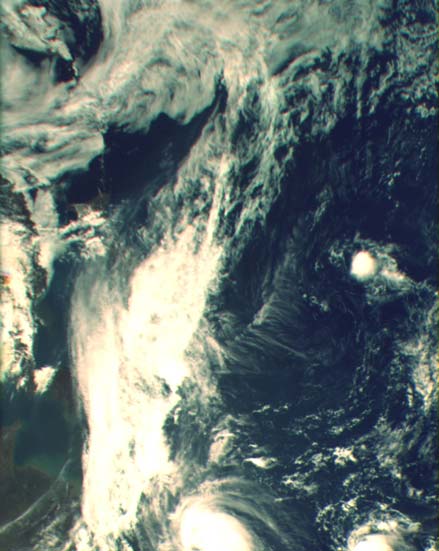
■写真5:地球スイングバイ後(5/19 日本時間夜)
(広角カメラ,モノクロで撮影)
|
|
宇宙航空研究開発機構 広報部
TEL:03-6266-6413〜6417
FAX:03-6266-6910