国際宇宙ステーションの「きぼう」日本実験棟のロボットアーム操作性評価試験(第2回)の実施について
宇宙開発事業団
宇宙開発事業団は、国際宇宙ステーション(ISS)の「きぼう」日本実験棟で使用するロボットアームの第2回操作性評価試験を5月21日より筑波宇宙センターにて実施することとなりましたのでお知らせします。
「きぼう」日本実験棟のロボットアームは、主に船外実験プラットフォームで使用する実験機器や部品の交換に用いられるもので、親アームと子アームから構成されています。第1回操作性評価試験(2000年3月実施)では親アームを対象に実施されましたが、今回は子アームと親アームを連結し、子アームの操作性を中心に評価試験を行います。子アームはこの試験のため筑波宇宙センターに搬入されたもので、筑波宇宙センターでの公開は初めてです。
操作性評価試験とは、宇宙飛行士による実際の操作を通じて「使い勝手」を評価する試験です。今回の試験には若田・土井両宇宙飛行士および米国航空宇宙局(NASA)宇宙飛行士2名、計4名が2グループに分かれて試験を行う予定です。
|
|
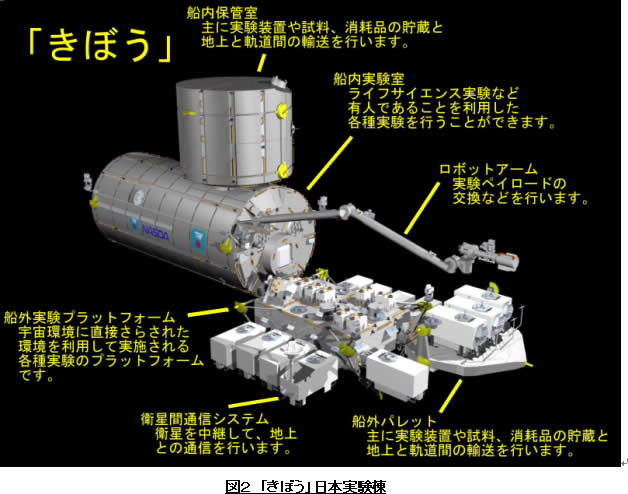
「きぼう」日本実験棟とロボットアームの概要
1. 「きぼう」日本実験棟について
国際宇宙ステーション(ISS)は、日米欧露加等15カ国が参画している国際共同プロジェクトで、日本は、「きぼう」日本実験棟を開発しています。
「きぼう」は日本が初めて開発する恒久的な宇宙の有人施設です。図1に国際宇宙ステーションの全体図を、図2に「きぼう」の構成図を示します。「きぼう」は、国際宇宙ステーションの進行方向の最前部に取り付けられます。
{kind=link}
{kind=link}
2. ロボットアームについて
「きぼう」日本実験棟の船内実験室に取り付けられるロボットアームは、「きぼう」での実験、保全作業支援に使用するロボットで、我が国で初めて実運用される宇宙用遠隔操作型ロボットアームシステムです。
過去においては、1997年8月にSTS-85(ディスカバリ号)で実験を行ったマニピュレータ(ロボットアーム)飛行実証試験(MFD:Manipulator Flight Demonstration)では、ロボットアームの子アーム相当のアームを使ってロボットアームの機能の一部を実証しました。また、1997年11月に打ち上げられた技術試験衛星VII型(ETS-VII、通称:おりひめ/ひこぼし)では地上からの遠隔操作を含めた宇宙用ロボットの基礎技術を蓄積するための各種実験が行われています。
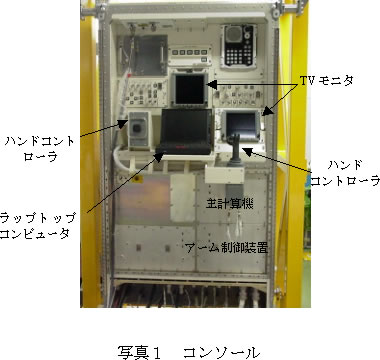
このロボットアームのシステムは、主にコンソール(写真1)、親アーム、および子アーム(図1)から構成されます。親アーム、子アームは共に6つの関節を持っていて、人間の腕と同様の動作が可能です。親アームは全長約10mで、比較的大きな対象物(最大7トンまで可能)を把持・移動することができます。子アームは全長約2mで、親アームの先端に取り付けられ、軌道上交換装置(ORU:Orbital Replacement Unit)の交換等、精密な作業を行います。このロボットアームを用いて船外パレットそのものや船外実験プラットフォーム/船外パレット上にある実験ペイロード/搭載機器の交換作業、各種実験支援または保守・保全作業支援を行うことで、宇宙飛行士が船外活動(EVA)する必要を減らすことが出来ます。
{kind=link}
{kind=link}
ロボットアームの操作は宇宙飛行士が船内実験室内で行い、アームに取り付けられているカメラからの映像をロボットアームコンソールのテレビモニタで確認しながら作業を進めて行きます。
「きぼう」のロボットアームは、軌道上で10年間という長期間使用されます。このため故障した場合にも、交換・修理ができなければなりません。万が一の故障に際しては船内活動(IVA)や船外活動(EVA)によって保全作業が行えるように作られています。また宇宙飛行士は長期間にわたりロボットアームを使用しますので、操作が無理なく容易に行えるようにヒューマン・マシン・インターフェース設計にも十分な考慮がなされています。
きぼうのロボットアームの主な仕様・性能を表1に示します。なお、子アームにはMFDで実証済みのコンプライアンス機能が備わっていて、アームの操作を宇宙飛行士が容易に行えるよう設計されています。コンプライアンス機能とは、ガイドに沿って物体を押し込むような動作が出来る機能です。
表1 きぼうロボットアームの主要仕様
| 項目 | 親アーム | 子アーム | |
|---|---|---|---|
| 型式 | 親子式6自由度アーム | ||
| 自由度 | 6 | 6 | |
| 長さ(m) | 約10 | 約2 | |
| 重量(kg) | 780 | 200 | |
| 取扱い重量(kg) | 最大7,000 | 最大300 | |
| 位置決め精度 | (mm) | ±50 | ±10 |
| (deg) | ±1 | ±1 | |
| 先端速度 | (mm/s) | 60(P/L:600kg以下) | 50(P/L:80kg以下) |
| (mm/s) | 30(P/L:3,000kg以下) | 25(P/L:300kg以下) | |
| (mm/s) | 20(P/L: 7,000kg以下) | - | |
| 最大先端力 | 30以上 | 30以上 | |
| 寿命 | 10年以上 | ||
3. 子アーム操作性評価試験(Human In the Loop(HIL)試験#2)
操作性評価試験(HIL試験)とは、ロボットアームの操作性を実際に宇宙飛行士が確認/評価する試験です。昨年3月には土井飛行士など5人の宇宙飛行士が参加して親アームおよびコンソールの操作性評価試験(HIL試験#1)を実施し、データ表示などの改善点が見つかりましたが、総合的には宇宙飛行士から高い評価を得ました。
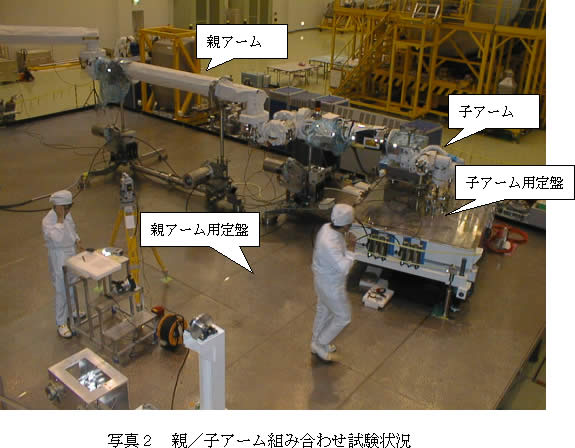
今回は、HIL試験#1でできなかった子アームのフライト品を使用した総合的な子アームの操作性について評価試験を行います。具体的には写真2に示すように広い定盤上に親アームと子アームを結合して設置した状態で軌道上での典型的な子アームの運用手順を実行することにより、指令送信の操作性、データ表示の視認性などから、子アームの応答性能まで幅広く評価する予定です。
{kind=link}
{kind=link}
期間は5/21〜6/1の2週間で、参加する宇宙飛行士は、土井隆雄飛行士、若田光一飛行士、Garett Reiseman飛行士、Steve Swanson飛行士です。
4. 今後の予定
この操作性評価試験(HIL#2)のあと、ロボットアームの他のシステム試験を6月中に行い、7〜8月にかけては様々な要求仕様に対して確実に検証されたかどうかを確認する審査会を実施した上で、10月から来年4月まできぼう全体のシステム試験を実施します。その後地上運用設備や実験ペイロードとの適合性試験を経た上で、来年11月頃には最初に打ち上げられるコンソールがケネディ宇宙センターに輸送される予定です。(親アーム/子アームはそれぞれの打ち上げスケジュールに応じて順次ケネディ宇宙センターに輸送されていく予定です。)
「きぼう」各要素の打上げスケジュール(予定)は以下の通りです。
| 船内保管室(ロボットアームコンソール搭載): | 2004年2月 |
| 船内実験室・ロボットアーム(親アーム): | 2004年5月 |
| 船外実験プラットフォーム・船外パレット(子アーム搭載): | 2005年1月 |