Q. 宇宙ロボットにはどのような種類があるのでしょうか?

上半身だけのヒト型ロボット「ロボノート2」(提供:NASA)
宇宙ロボットは使用される場所や用途などにより、「軌道上ロボット」「月惑星探査ロボット」「有人宇宙活動支援・代行ロボット」の3つに分類されます。軌道上ロボットは、宇宙ステーションや人工衛星に搭載して使われるロボットで、例えば、ISSに取り付けられたカナダ製ロボットアーム(SSRMS)や「きぼう」日本実験棟のロボットアーム(JEMRMS)など、クレーンのような働きをするロボットです。月惑星探査ロボットは、月惑星の表面で働くロボットで、現在火星を探査中の火星探査ローバー「キュリオシティ」はその一つです。火星や小惑星など遠方の天体では地上からの遠隔操作に時間がかかるため、月惑星探査ロボットは自律制御機能を持っています。そして有人宇宙活動支援・代行ロボットは、船内や船外の宇宙飛行士の作業を支援、代行するロボットで、REX-Jのほか、2011年に打ち上げられたNASAの「ロボノート2」などがあります。
Q. その中で日本が得意とする分野は何でしょうか?

「きぼう」日本実験棟のロボットアーム(提供:NASA)
日本はカナダと並び、宇宙用ロボットアームの分野で世界をリードしています。「きぼう」日本実験棟のロボットアームは親アームと子アームで構成されていて、とても操作しやすいと宇宙飛行士からも高く評価されています。この開発に先駆けて、1997年には、スペースシャトルの貨物室でマニピュレータ飛行実証試験(MFD)が行われました。そして、1998年〜1999年には、私が数名の仲間と提案した技術試験衛星VII型「きく7号」(ETS-VII)「おりひめ・ひこぼし」により、衛星搭載ロボットアームの軌道上実験が行われました。これらの成果が、「きぼう」のロボットアームの設計に反映されています。 また「おりひめ・ひこぼし」は、世界で初めて、自動、及び地上からの遠隔操縦による無人の人工衛星同士のランデブー、及び非衝撃方式のドッキングに成功し、大きな注目を集めました。この結果を利用しているのが、現在活躍する宇宙ステーション補給機「こうのとり」です。このように日本は、宇宙ロボットに限らず、世界に誇れるさまざまな宇宙技術を持っています。
Q. 宇宙ロボットはいずれ宇宙飛行士の代わりになると思いますか?
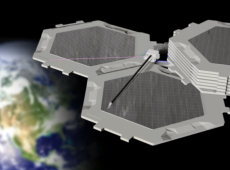
REX-Jによる太陽発電衛星建設のイメージ
それはないと思います。宇宙での作業は多岐に渡り、繊細な作業や瞬時の判断は、宇宙飛行士が得意です。一方、単純で長時間を要する作業や、大型宇宙構造物の組み立て保守はロボットに向いています。具体的には、ISS内での実験装置のモニタや操作。船外活動の時に使う工具の片付けや、写真撮影などの記録。ISSの外壁にスペースデブリによる衝突痕がないかを見る調査。さらには、故障した人工衛星やスペースデブリの捕獲、月面基地や太陽発電衛星などの建設や保守といった、危険を伴う作業や、長時間を要する作業はロボットの仕事です。宇宙観光ホテルの建設も今後は考えられるでしょう。このように、それぞれの作業に必要とされる能力や、安全性確保の観点から、宇宙飛行士がやるべきか、ロボットが行うべきかを考え、うまく共存していくことが大事だと思います。 Q. REX-Jによる太陽発電衛星の建設をすでに視野に入れていますか? はい。ISSは約100m四方で完成させるまでに10年程かかりました。太陽発電衛星は5 km四方くらいの大きさになると思いますが、それを半年で完成させたいと思っています。太陽発電衛星はISSの概略5000倍の大きさ(体積)だとすると、おそらく1000台のロボットがあれば建設可能だと考えています。でも課題は、1000台のロボットをどうオペレーションするかです。さすがに1人で1000台を管理するのは厳しいですが、5人〜10人で運用できるようにはしたいですね。そこは新しいチャレンジです。
Q. 宇宙ロボットを作る面白さは何でしょうか?

地上用ロボットと宇宙用ロボットは、ハードウエアとして見るとほとんど同じですが、大きく違うのは、打ち上げ時の振動や宇宙放射線に耐えられるかどうかです。これはロボットに限らず、宇宙用機器全般にいえます。一番大事なのは、信頼性のある、確立された技術をどのように組み合わせて、ミッションの要求に応えられるシステムを作るかということです。しかも、その際、誰も思いつかないような方法で簡単にミッションを達成する方法を考えることに、エンジニアとしての冥利を感じますね。でも、ある程度訓練していないと、なかなか新しいことを思いつかないかもしれません。 Q. どんな訓練が必要なのでしょうか? これは何かの時に使えるかもしれない、というアイデアのストックをどれだけ持っているかがポイントだと思います。アイデアは考えると出てくるものではなく、何か他のことをしている時などに、ちょっとしたことをきっかけにひらめくものです。そのひらめきをアイデアのヒントとしてストックしておくと何かの時に役立つものなのですよ。
Q. 将来、こんな宇宙ロボットを作りたいという夢はありますか?

開発中の高出力繊細ロボットハンド
いちいち指図をしなくても、念力で動かせる宇宙ロボットを作りたいですね。ケーブルでつながっていなくても、頭の中で「動け」と意識すれば動くようなロボットは、地上の実験室レベルではすでにありますので、将来的には宇宙でも実現できると思っています。 Q. REX-Jの技術は、地上でも活用されますか? REX-Jには、フックを取り付けたり、取り外したりする時に使われるロボットハンドが付いています。これは、JAXAと民間企業の共同研究で開発された「高出力精細ロボットハンド」を、REX-J用に2本指に簡略化したものです。宇宙飛行士が船外活動する時とほぼ同じ器用さと握力を兼ね備えていて、地上と宇宙で兼用できるよう開発されています。今回、REX-Jでその技術を実証できれば、商品化が実現し、産業用ロボットや介護ロボットなど幅広い利用ができると期待しています。
Q. 今後の抱負をお聞かせください。
REX-Jは、「Robot Experiment on Japanese Experiment Module」の略で、「きぼう」日本実験棟でのロボット実験という意味ですが、頭文字をとった「REX」は、王様という意味があります。少し図々しいかもしれませんが、宇宙ロボットの王様を目指すという願いを込めて、この名前をつけました。REX-Jによる実証実験を成功させた後、REX-J2、REX-J3と続けて、最終的には実用化にもっていきたいと考えています。そして、その名の通り、世界を代表する宇宙ロボットになってほしいと思います。
小田光茂(おだみつしげ)
東京工業大学大学院機械宇宙システム専攻教授
JAXA研究開発本部ロボティクス研究グループ 非常勤招聘研究員「REX-J」実験提案者(PI:Principal Investigator)
1977年、東京工業大学大学院制御工学専攻修士課程修了。同年4月、宇宙開発事業団(現JAXA)に入社し、人工衛星の姿勢制御技術、及び宇宙ロボット技術の研究開発に携わる。1997年に H-IIロケットで打ち上げられた技術試験衛星VII型「きく7号」(ETS-VII)「おりひめ・ひこぼし」では、人工衛星に搭載されたロボットアームを地上から遠隔操作して、各種の作業ができることを世界に先駆けて実証。2003年、JAXA研究開発本部未踏技術研究センター ロボティクス研究グループ技術領域リーダー。2012年、東京工業大学大学院機械宇宙システム専攻教授。専門は宇宙ロボット技術。