
Q. REX-J(レックスジェイ)とは、どのような宇宙ロボットですか?

REX-J ロボット実験装置
REX-Jは、宇宙飛行士による船外活動(EVA: Extravehicular Activity)を支援、代行する「有人宇宙活動支援・代行ロボット」です。国際宇宙ステーション(ISS)には3名、時には6名の宇宙飛行士が滞在していますが、彼らの労働時間は1日8時間、週休2日と決められています。その限られた時間内で実験や実験装置の補修など多くの作業を行っています。さらに、船外活動をする際は、0.3気圧という宇宙服内の低い気圧に体を慣れさせるため、約4時間半の減圧時間が必要です。作業終了後にも、ISS内部の1気圧に体を戻すために時間を要します。また船外活動には、宇宙放射線やスペースデブリの衝突といった宇宙飛行士の生命に係る危険性があります。そのため、宇宙飛行士の船外活動時間や回数は厳しく制限されており、船外活動でできる作業は限られています。このような問題を軽減するため、REX-Jは宇宙飛行士の船外活動を支援・代行します。
Q. 現在軌道上で行われているREX-Jの実験の目的は何でしょうか?
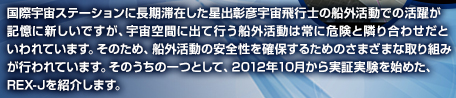
「きぼう」の船外実験プラットホームに取り付けられたポート共有実験装置(提供:JAXA/NASA) 
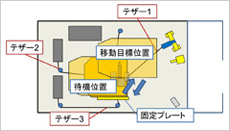
テザーによるロボットの移動原理
![]()
テザーはフックで手すりに固定される 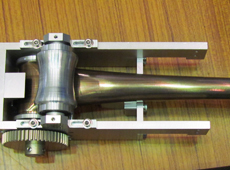
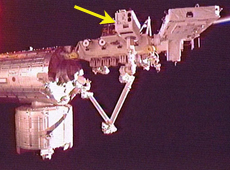
巻尺のような機構のロボットアーム
これまでに実用化されている宇宙ロボットの機能は非常に限られたものですが、遅かれ早かれ、宇宙飛行士並み、あるいは宇宙飛行士以上の仕事をしてくれる宇宙ロボットが必要になります。そのような宇宙ロボットを実現するにはいくつかのキーとなる技術が必要ですが、それらの技術を開発し実際の宇宙空間で実証実験を行うのが REX-Jです。地上用のロボットでも同じですが、宇宙ロボットの開発にあたっては、3つのキーとなる機能があって、それらをどのように実現するかによってロボットの形や動作方法が変わってきます。1つ目の機能は、作業する場所へ「移動」する人間の足に相当する機能。2つ目は、状況を観察し、何をするべきか「判断」する機能、これは人間でいえば目や頭に相当します。そして3つ目は、実際に作業をする「手」に相当する機能です。REX-Jではこれらの機能のうち、「宇宙空間での移動技術」を開発することを目指しています。実験は、「きぼう」日本実験棟の船外実験プラットフォームに取り付けられた箱(ポート共有実験装置)の内部で行っています。 Q. REX-Jはどのように移動するのでしょうか? また具体的な実験内容を教えてください。 REX-Jのロボットは、テザー(紐)で懸垂され、テザーの長さを調整することにより移動します。例えば、前方に進みたい時は、前方のテザーを引っ張り、後方のテザーはロボットの動きの邪魔にならないようにロボットの動きに合せて長さを長くします。また、テザーの取り付け位置を変更することにより、ロボットの動く範囲を変えてやることも可能です。テザーの一端はロボット本体に取り付けられており、このテザーのもう一方の端は、テザーの先端に取り付けられたフックを用いて、国際宇宙ステーションの内外の壁面等に取り付けられているハンドレール(手すり)に固定されます。
このテザーをハンドレールに固定するためのフックの操作は、伸展式のロボットアームを用います。このロボットアームはREX-J以外には例のないユニークなロボットアームです。このロボットアームは巻尺のような仕組みで、先端にロボットハンドが取り付けられています。このロボットアームは、伸展させると10m以上の長さになりますが(今回軌道上で実験しているREX-Jに搭載されているものは必要最小限の長さとして約2m)、収納時には長さが30cmと非常にコンパクトになります。
ただし、これらのREX-Jで用いているロボットの原理は、重力のない宇宙空間でなければ動作できません。そのため、このロボットの原理を実証するためにREX-Jが計画されたのです。REX-Jは2012年7月21日に宇宙ステーション補給機「こうのとり」3号機で打ち上げられ、基本動作の確認をした後、10月中旬から本格的な実験を開始しました。6ヵ月間の予定で行っている実験では、伸展するロボットアームの動作確認とテザーによる移動の確認。テザーを使って振動なく移動できるかの試験などを行います。そして最終的には、ポート共有実験装置の側面にある窓からロボットアームを外に出して、ISSの観察や、宇宙の熱環境にさらされた状態での動作確認を行う予定です。
関連リンク: 国際宇宙ステーションでのロボット実験(REX-J紹介映像)
Q. これまでの実験でどのような成果がありましたか?
テザー制御による移動の仕組み
![]()
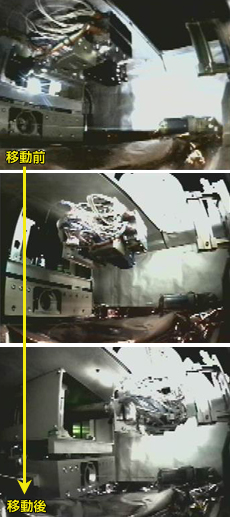
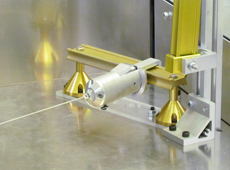
ロボット本体のテザー制御による移動の様子
REX-Jの実験は地上の運用管制室からの遠隔操作で行っています。まずは、ロボット本体に収納されていたフックをロボット本体から引き出し、ロボットアームをハンドレールまで伸ばしてフックを取り付けることに成功。ロボットハンドでフックを把持して、フックの先端を開き、ハンドレールにしっかり固定することができました。その後、4本のテザーを制御してロボットを移動させることにも成功し、実験は順調に進んでいます。引き続き、伸展式ロボットアームとテザーを使った実験を実施し、世界初となるこの移動方式をより確実なものにしていきたいと思っています。
関連リンク: REX-J実験レポート
Q. ロボットアームとテザーを使うというアイデアはどこから生まれたのでしょうか? ひらめきです。「乾いた雑巾でも、絞り方によっては水は出る」と言うのが私の持論ですが、じっくり考えればアイデアは出てくるものなんです。この乾いた雑巾も、窓際か庭に一晩置いておけば、朝にはしっかりと水を含んでいますよ(笑)。
私はREX-Jの前に太陽発電衛星(SPS)の研究に携わっていました。太陽発電衛星は、軌道上で太陽光を利用して発電するシステムです。太陽発電衛星は大型の構造物なので、宇宙で組み立てる時に、長距離を簡単に移動できる方法がないかを考え、テザーを使えば簡単に移動できると思いつきました。
一方、伸展式ロボットアームの伸び縮みする仕組みは、40年も前からある技術(人工衛星の伸展式アンテナの技術)の応用です。伸展式のアンテナは、形状記憶合金とバネの力を利用して巻尺のように巻いた状態で収納されていますが、衛星が軌道上に到達した後に、アンテナの打ち上げ時固定機構が解除されると、収納されていたアンテナはほぼ瞬時に延びて棒状になります。ただ、従来のアンテナですと、一度伸びたら元には戻りません。この仕掛けにモータを取り付け、伸展、収縮できるようにしたのがREX-Jの伸展式ロボットアームです。
ですから、私は、まったく新しいことをやっているわけではなく、既存の技術を少し改造しただけです。まったく新しい技術を組み合わせて新しいものを作るのではなく、既存のものを組み合わせるから、ほぼ間違いなく成功します。それが結果的に、これまでにない新しい方法になれば最高にいいですよね。REX-Jはまさにそれなんです。