EVA支援ロボット実証実験
「REX-J」のロボット移動技術の実証について
-船外でのテザー取付けと移動に成功-
宇宙航空研究開発機構
宇宙航空研究開発機構(JAXA)は、国際宇宙ステーション(ISS)「きぼう」日本実験棟 船外実験プラットフォームのポート共有実験装置(MCE)ミッションの一つとして実施した「EVA支援ロボット実証実験(REX-J)」において、テザー(紐)制御によるロボットの空間移動技術の実証に成功しました。
今回の実験では、ロボットに内蔵した伸縮自在のロボットアームとロボットハンドを使って、テザー先端のフックをハンドレールに取り付け、4本のテザーで支持し、テザーの長さを制御してロボットを移動させました。本実験により、JAXAは、世界初となるロボットの自己取付けテザーによる移動技術の実証に成功し、小型のロボットで大型構造物上を空間移動する方式の軌道上確認と構成要素の特性データを取得するというミッション目的を達成することができました。
REX-Jは、宇宙飛行士の船外活動(EVA)を支援・代行するロボットの実現を目指し、同ロボットを実現する上で不可欠な「空間移動技術」の要素技術を実証実験するミッションで、平成24年7月21日(日本標準時)に種子島宇宙センターから「こうのとり」3号機/H-IIBロケット3号機によって打ち上げられました。同年8月に初期機能確認を実施、同年10月より本格的な実験運用を実施しています。
JAXAの宇宙ロボット技術は、これまでもISS日本モジュールマニピュレータ(JEMRMS)や技術試験衛星VII型(ETS-VII)などにより、世界的に高い評価を得ています。
今後REX-Jでは、ロボットアームの特性を評価するために、MCE外部にロボットアームを伸展させる実験やロボットアーム先端のカメラで「きぼう」周辺の画像を取得するなど、今後の宇宙ミッションに応用可能な技術実験を実施する予定です。
本情報の詳細につきましては、次のインターネットアドレスでご覧頂けます。
【http://robotics.jaxa.jp/rexj/rexj_topics.html】
|
|

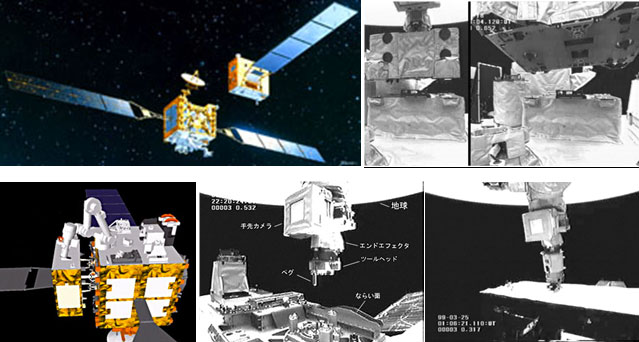
ポート共有実験装置(MCE)とREX-Jロボット実験装置
【実験イメージCGと実際のカメラ映像】
- 伸展式ロボットアームによるテザー取付け
テザー先端のフックをロボットハンドで把持したあと、伸展式ロボットアームを制御しハンドレールにフックを取り付ける。


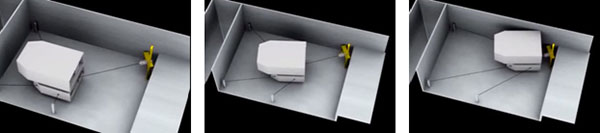
- テザーによるロボット本体移動
REX-Jでは、4本の支持テザーのうち3本の長さを制御する(左側2本を伸ばしながら右側の1本を縮める)ことによってロボット本体が右側へ移動していく。

JAXAにおける宇宙ロボットの研究開発実績
●国際宇宙ステーション日本モジュールマニピュレータ(JEMRMS)
- JEMRMSは、約10m長と約1.5m長の親子式ロボットアームで、輸送コンテナや実験機器の輸送台の搬送・着脱や各種実験機器の交換作業、点検作業に使用されている。
- 良好な位置決め性能・操作性を有しており、2008年の打上げ以降、順調に活用され、マニピュレータの有効性を示している。

●技術試験衛星VII型(ETS-VII)
- ロボット、ランデブ・ドッキングの実験衛星で1997年に打上げられた。
- 世界に先駆けて高精度の低衝撃自動ランデブ・ドッキング実験を実施した。
- 約2m長のロボットアームを搭載し、世界に先駆けて画像センサによる追従制御や力制御などによる宇宙ロボット作業実験が実施された。
- 地上からの遠隔操作や自動制御により、百数十日の実験で、機器交換、推薬補給、精密作業、衛星捕獲などの実験を成功裏に実施し、宇宙ロボットによる軌道上サービスの基本技術を実証し、世界をリードしている。