EVA支援ロボット実証実験「REX-J」の定常運用実験終了について
平成25年7月26日
宇宙航空研究開発機構
宇宙航空研究開発機構(JAXA)は、国際宇宙ステーション(ISS)「きぼう」日本実験棟 船外実験プラットフォームのポート共有実験装置(MCE)ミッションの一つとして実施した「EVA支援ロボット実証実験(REX-J)」について、計画していた全ての実験を終了しました。
REX-Jは、宇宙飛行士の船外活動(EVA)を支援・代行するロボットの実現を目指し、同ロボットの実現に不可欠な「空間移動技術」を実証実験するミッションで、平成24年7月21日(日本標準時)に種子島宇宙センターから「こうのとり」3号機/H-IIBロケット3号機によって打ち上げられました。同年8月に初期機能確認を実施、同年10月に本格的な実験運用を開始しました。
これまでの実験によって、ロボットの基本機能動作など予定された全ての計画を終了し、世界初となる三つのロボット技術の実証に成功しました。
(1)伸展式ロボットアーム動作の宇宙実証
(2)テザーを用いたロボット移動の宇宙実証(曝露環境下)
(3)伸展式ロボットアームとテザーを用いたロボット移動の宇宙実証
本実験で得られた成果について、今後の有人宇宙活動支援ロボットや大型構造物の組立保守ロボットなどの宇宙作業ロボットへの活用を進め、宇宙飛行士に代わって、あるいは、支援しながら目的の作業を行う「有人宇宙活動支援ロボット」の実現を目指します。
本情報の詳細につきましては、次のURLでご覧頂けます。
http://robotics.jaxa.jp/rexj/rexj_topics.html
|
|
ポート共有実験装置(MCE)とREX-Jロボット実験装置
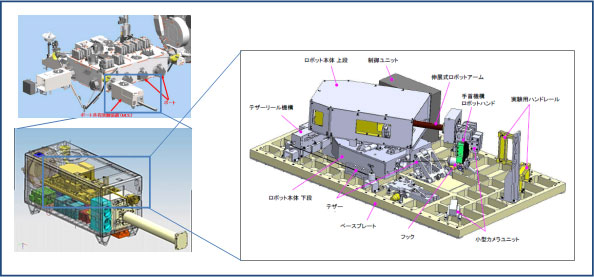
ポート共有実験装置(MCE)とREX-Jロボット実験装置
実証した世界初のロボット技術
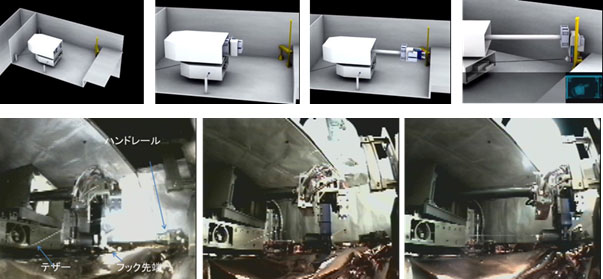
(1)伸展式ロボットアーム動作の宇宙実証REX-Jでは、軽くて伸び縮み可能な中空円筒状のロボットアームを開発し、宇宙での動作を世界で初めて実証しました。伸展式ロボットアームは、最大約1mまで伸ばすことができ、1/10 mm単位の精度で伸展制御できることを実証しました。当該ロボットアームは地上重力下ではアーム先端部に取り付けたロボットハンドの重みで折れ曲がるほど柔軟性があるため、地上で確認することが困難でした。今後は、REX-Jの成果を活用し、軽量で伸縮比が高い特徴を活かして、大型構造物の組立保守に用いるロボットアーム等への応用を目指します。上側が実験イメージCGの画像で、下側が宇宙実験における伸展式ロボットアームの動作を「きぼう」ロボットアームのカメラで撮影した連続画像です。
(2)テザーを用いたロボット移動の宇宙実証
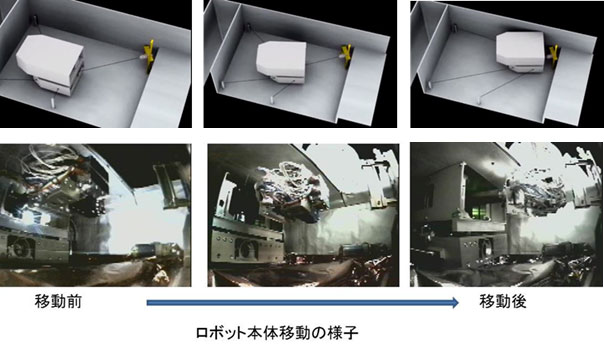
REX-Jでは、3本のテザー(ひも)の長さを変えて移動する方式のロボットを開発し、宇宙曝露環境下での動作を世界で初めて実証しました。今回は船外活動支援ロボットの実験として宇宙ステーションの外にある「きぼう」船外実験プラットフォームの宇宙曝露環境で実験を行い、200mm程度の移動範囲に対して1mm単位の精度でロボットの位置を制御できることを実証しました。テザーで移動する形式のロボットは、地上では重力が一定方向に作用するため、ロボットの位置と姿勢は安定します。一方、軌道上の微小重力下では、テザーを常に張った状態にしないとロボットは浮遊してしまい、位置と姿勢が安定しません。そのため、テザーの緩みを生じさせないよう地上と異なる制御方法の確立を目指し、REX-Jで実証しました。今後は、REX-Jの成果を活用し、テザーで移動する形式のロボットを活用して、宇宙ステーション等の大型構造物の周囲を移動できるロボットへの応用を目指します。上側が実験イメージCGの画像で、下側が実際の実験におけるテザーを用いたロボットの移動をREX-Jが搭載するカメラで撮影した連続画像です。
(3)伸展式ロボットアームとテザーを用いたロボット移動の宇宙実証
REX-Jでは、伸展式ロボットアームを用いて離れた場所にある手すり(ハンドレール)にテザーを取り付けて移動範囲を広げて、ロボットの移動を行う技術を世界で初めて実証しました。今回のREX-Jで実証したハンドレールへのテザーの取り付け技術により、宇宙ステーションの壁面に沿って移動範囲をロボット自身が決めて移動を行うための基盤技術を確認できました。
参考として、NASAはスペースシャトルの船内でテザーを用いたロボットの実験を行っています(1995年のSTS-63ミッションにおけるCharlotte)。REX-Jでは、宇宙船外で実施したこと、及びテザーの取り付け技術を新しく扱ったことが、NASAが行った実験との違いです。特に、今回対象としている船外活動では、人がロボットの近くにいることは必ずしも想定できません。そのため、ロボット自身がテザーの取り付け位置を変えて移動範囲を広げる技術をREX-Jで実証しました。
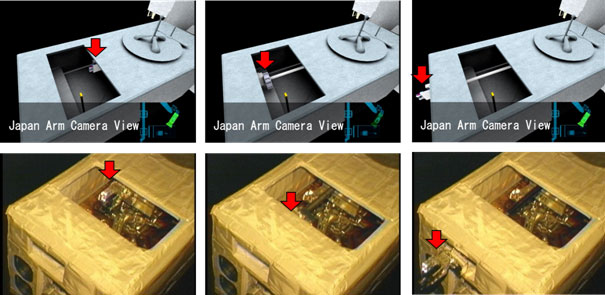
上側が実験イメージCGの画像で、下側が宇宙実験におけるテザーの取り付け作業をREX-Jが搭載するカメラで撮影した連続画像です。