小型衛星から放出した小型ターゲットのカラー画像処理実験に成功
独立行政法人 航空宇宙技術研究所
宇宙開発事業団
航空宇宙技術研究所(NAL)と宇宙開発事業団(NASDA)は、マイクロラブサット1号機(開発:NASDA)に搭載された画像処理コンピュータ及び小型低消費電力カラーカメラ(開発:CRL)を用いて、同衛星から放出された小型ターゲット(模擬衛星)を撮影し、カラー画像処理を行う実験に成功しました。
<背景>
NALではスペースデブリ(宇宙ゴミ)問題に対する総合的な取り組みの一環として、故障衛星や衛星ゴミなどの回収・修理・除去システムの研究を進めています。また、軌道上での宇宙ロボットによる構造物組立システムの研究も進めています。スペースデブリの画像認識・計測技術は、そのようなシステムを実現する上で重要な基盤技術の一つです。
<概要>
スペースデブリの回収・修理・除去では、作業する衛星が軌道上で回収対象を認識し、位置や運動を計測することが必要です。回収対象である故障衛星や衛星ゴミからの協力は期待できないため、カメラ画像による画像計測が位置や運動の計測手段として限られた有効な方法の一つです。しかし、回収対象の形状は必ずしも予め判っていないため、地球などの背景から対象の形を抽出することは容易ではありません。この課題を解決する有望な手段がカラー情報を用いた画像処理です。また、この技術は宇宙ロボットによる軌道上構造物組立におけるカラー視覚マーキングの抽出にも活用できます。
今回の実験の目的は、次の点を軌道上で実証することです。
- 衛星から放出された小型ターゲット(直径:10cm、オレンジ色)を実際に軌道上の太陽光の影響下で地球を背景にして撮影し、その形状を抽出及び計測をすることにより、カラー画像処理の有効性を確認すること。
- 限られた性能の衛星搭載コンピュータでこのような画像処理が行えることを確認すること。
画像処理コンピュータ及び小型低消費電力カラーカメラは、通信総合研究所(CRL)が民生用技術を基に開発したものです。また、今回の実験に使用した画像処理ソフトウエアはNALで開発されたものです。これらの搭載機器及び画像処理ソフトウエアは、NASDAが開発したマイクロラブサット1号機に搭載され、昨年12月14日にH-IIA 4号機により打ち上げられました。その後、本年3月14日、NASDA筑波宇宙センターからの遠隔操作により、小型ターゲットの放出とカラー画像処理の実験が行われ、その結果、実際の軌道上の太陽光の影響下及び地球背景でもターゲットの抽出が行え、カラー画像処理が有効であることが確かめられました。また、その後の解析により、衛星搭載コンピュータで全ての処理が正常に行われたことが確認されました。
<今後の展開>
今後、CRL及び東京大学等と協力して、軌道上での画像処理や対象物の追跡、対象物の運動の推定等の実験を行う予定です。また、今回の実験で確認した画像処理技術を宇宙システムに適用する研究・開発を進めます。

写真1 小型衛星からの放出直後の小型ターゲット(背景は西日本)

写真2 地球を背景に遠ざかる小型ターゲット(左下隅の黒い影は衛星上のアンテナの一部)

写真3 太陽光を浴びてオレンジ色に輝く小型ターゲット(背景はフィリピン諸島)
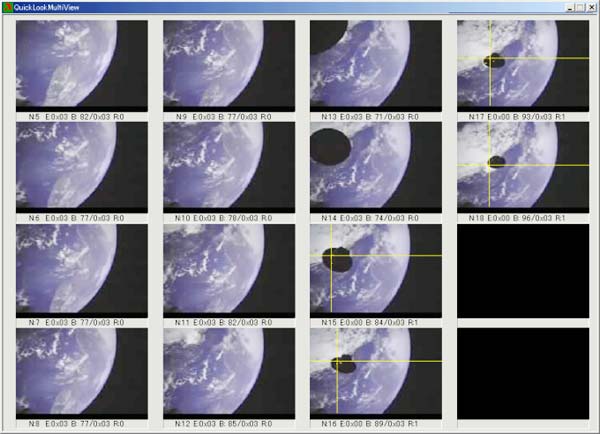
写真4 画像処理によるターゲット抽出結果の例(運用装置上の表示:黄色い十字線が検出位置を示す)
補足資料
[ターゲット放出実験]
地球を背景としたターゲット画像を取得するために、衛星を模擬した小型のターゲット(図1)をマイクロラブサット1号機から放出(図2)し、これを同衛星上のカメラで約8秒間隔で連続的に撮影し、画像処理計算機で画像処理を行いました。結果は、高圧縮比の画像と共に時々刻々と地上へ転送されました。ターゲットは、小さなプラスティックの板バネにより押し出されて1cm/秒弱の速度で放出されました。ターゲットには、人工衛星の外面に多用されているカプトンフィルムの色に近いオレンジ色の塗装を施しており、画像処理では、画像からこの色の部分を抽出することにより小型ターゲットを抽出・計測できました。
なお、本実験は、マイクロラブサットの三軸姿勢制御(慣性指向)状態で行われました。

図1 NAL実験に使用した小型ターゲット
図2 マイクロラブサット1号機からの小型ターゲット放出の概念
<宇宙ゴミ(スペースデブリ)問題>
軌道上に打ち上げた衛星やロケットは、その役目を終えればゴミになります。人類の過去50年の宇宙開発で生成されたこれらのゴミの多くは、未だに地球周回軌道を回っており、運用中の衛星や宇宙ステーションへの衝突の可能性があります。NALでは、この宇宙ゴミの問題を解決するために総合的に研究を進めており、その一環として故障衛星などの宇宙ゴミを回収・修理・除去するロボット衛星システム(図3)の研究を行っています。宇宙ゴミの回収・修理・除去においては、まず軌道上で作業衛星が回収対象を認識し、位置や運動を計測することが必要です。
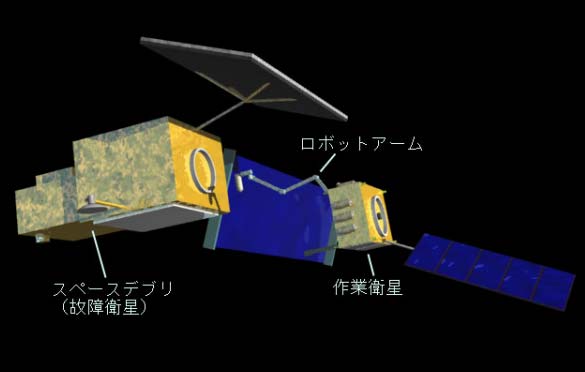
図3 スペースデブリの回収の概念
<宇宙ロボットによる軌道上組立>
宇宙望遠鏡や宇宙電波望遠鏡の分解能を高めるためには、より高精度で大きな開口径の反射鏡が必要となります。この様な軌道上構造物の構築には、宇宙ロボットによる軌道上組立(図4)が有効です。NALでは、この様な宇宙ロボットによる軌道上での構造物組立の研究を進めています。 宇宙ロボットによる構造物組立では、大きな組立部材の精密な位置合わせを行う必要があり、視覚マーキング(視覚的指標)を目印としてロボットを制御します。この場合も視覚マーキングのカラー化(図5)により画像処理による視覚マーキングの抽出性が向上します。
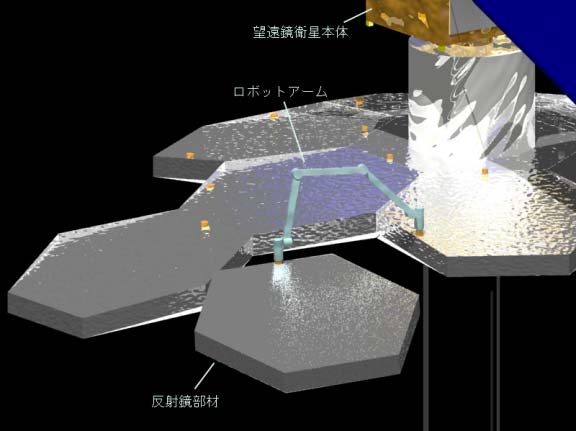
図4 宇宙ロボットによる大型反射鏡の軌道上組立の概念
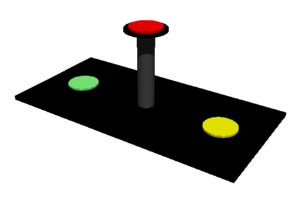
図5 カラー視覚マーキングの例
[マイクロラブサット1号機]
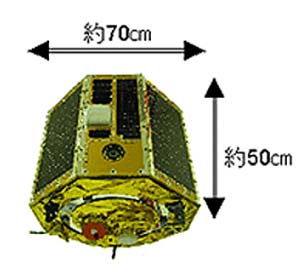
マイクロラブサット1号機は、宇宙開発事業団のマイクロスペースシステム研究室が、先端技術の軌道上実証、衛星バスの小型化及び低コスト化などを実現することを目的として開発した50kg級の小型衛星です。大型衛星などを打ち上げる際に生じるロケットの余剰能力を有効に活用する、いわゆるピギーバック衛星として開発され、H-IIA4号機による2002年12月14日に打ち上げられました。現在は高度約800kmの極軌道を飛行中です。現在の衛星の状態は良好で、すべて順調に機能しています。
<マイクロラブサット1号機>
| 項目 | 諸元 |
|---|---|
| 寸法 | 688φ×515[mm](分離後) |
| 形状 | 8角柱 |
| 質量 | 約54[kg](分離後) |
| 慣性能率比 | 1.05以上 |
| 発生電力 | 55[W]以上 |
| 姿勢 | スピン(定常)、三軸(ミッション) |
| 通信 | 周波数:S帯 コマンド:500[bps] テレメトリ:1024(HK)/4096(ミッション)[bps] |
| 運用予定期間 | 3ヶ月以上 |
| 軌道 | 高度約800[km]、傾斜角役99[°] |
| 打上げ | H-IIAロケット ピギーバック方式 2002年(平成14年)12月14日 |
|
|