
ミッション概要
- 近傍運用
- ISSへの最終アプローチ
- ISSのロボットアームによる把持
- ハーモニー(第2結合部)下側の共通結合機構(CBM)への結合
- 結合部(ハーモニーとHTVの連結部)の配線接続、ケーブルの取付けなど
近傍運用
ISSとの直接通信が可能な近傍通信領域に到達すると、HTVは、ISSに搭載されている近傍通信システム(PROX)との通信を確立し、GPS相対航法を開始します。その後、GPS相対航法を用いたマヌーバを実施して、ISSの後方約5kmの接近開始点(Approach Initiation: AI)で、ISSに対して相対停止を行います。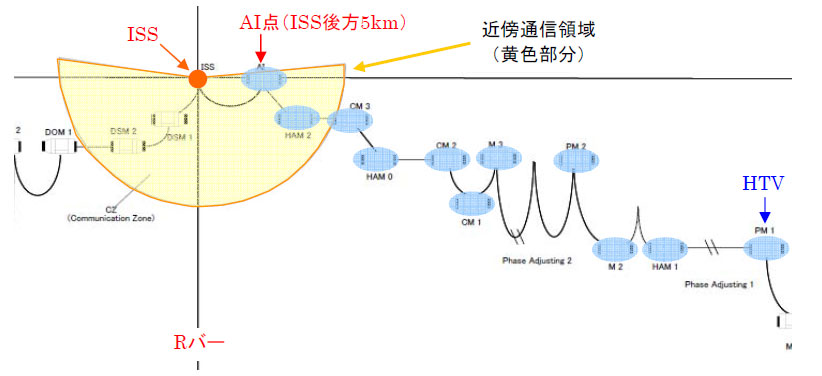
※クリックで拡大します
AI点に到達する90分前から、ISSミッションコントロールセンター(MCC-H)によるISS全体運用の管理監視が開始され、それ以降はHTV運用管制室とISSミッションコントロールセンター(MCC-H)との統合運用となります。HTVは、AI点に到達する90分前からISSへの結合終了までの運用を、クルーの活動時間内に実施するため、ランデブフェーズにおいて、最大24時間(位相調整時に16時間、AI点で8時間)の時刻調整を行ないます。
ISSへの最終アプローチ
ISSミッションコントロールセンターからHTVのISSへの接近が許可されると、HTV運用管制室からのコマンドでAIマヌーバを実施します。HTVは、相対GPS航法でISSの下方(Rバー上)約500m(RI点)まで移動し、そこからはランデブセンサ(Rendezvous Sensor: RVS)から照射したレーザ光を、「きぼう」船内実験室の下側に設置された反射器(レーザレーダリフレクタ)に反射させて位置を確認しながら下方からISSに接近します。
ISSの下方300m(ホールドポイント)および30m(パーキングポイント)の2点で自動的に停止を行い、最終的に、ISSの下方10m付近で相対停止します。
この最終アプローチ中、緊急時には、ISSクルーは搭乗員用コマンドパネル(HCP)で、接近の一時停止(HOLD)、後退(RETREAT)、接近中止(ABORT)などのコマンドを送信してHTVを制御することができます。
なおHTVは、ISS下方300m地点で、ヨー方向(横方向)に姿勢を180度回転してメインエンジンの方向を変更します。これは衝突回避運用に備えた姿勢変更で、緊急時に、安全にHTVをISSの前方に退避させるために実施するものです。
※クリックで拡大します
ISSのロボットアームによる把持
 HTV運用管制室は、HTVがISSの下方10m付近でISSに対して相対的に停止したことを確認すると、HTVのスラスタを停止します(フリードリフト状態)。
HTV運用管制室は、HTVがISSの下方10m付近でISSに対して相対的に停止したことを確認すると、HTVのスラスタを停止します(フリードリフト状態)。その後、ISSのロボットアーム(SSRMS)でHTVのグラプルフィクスチャ(FRGF)を把持します。
ハーモニー(第2結合部)へのドッキング/結合部の艤装作業
ISSのロボットアームで把持されたHTVは、「ハーモニー」(第2結合部)の地球側の共通結合機構(CBM)に結合されます。