
ミネルバは、「はやぶさ」に搭載された日本初の惑星探査ローバです。大きさは直径12cm、高さ10cmの正16角柱で、重さは591gです。ミネルバは、「はやぶさ」が小惑星イトカワに接近した時に放出し、小惑星表面に着地した後は、自律的に移動し、表面を跳ねながらカメラや温度計を使って観測をします。
2003年5月9日の「はやぶさ」打上げから2年半が経過した2005年11月12日に、ミネルバは「はやぶさ」から放出されましたが、残念ながら、イトカワに着地しませんでした。しかし、放出直後に、「はやぶさ」の太陽電池パドルを撮影しました。これは、宇宙空間で外部から深宇宙探査機を撮影した史上初の画像です。また、ミネルバは放出後も安定して動作し、多くの新しい工学技術の実証を行なうことに成功しました。
Q.ミネルバの跳ねて移動するアイデアはどのようにして生まれたのですか?
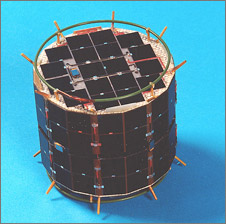
探査ロボット「ミネルバ」
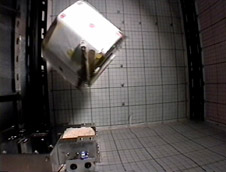
「ミネルバ」のホップ実験の様子
当初「はやぶさ」にはNASAのローバのみを搭載する予定でしたが、日本も負けずに、独自のローバを搭載しようという計画がスタートしました。1998年のことです。その後、NASAのローバはアメリカ側の事情でキャンセルになり、ミネルバだけが「はやぶさ」に搭載されました。どのようなロボットを作ろうかと考えた時に、アメリカが考えていた車輪式とは違うものにしたいと思いました。また、他とは違う、日本のオリジナルで作りたいというプライドがありました。理論や実験ベースで検討した結果でも、跳ねる方法がいいという結論になり、ホッピング方式に決まりました。ミネルバは、どのような姿勢で着地してもホップする(跳ねる)ことができます。
Q.ミネルバの開発で苦労された点はどのようなことですか?
最初に悩んだのは、小惑星イトカワの表面の重力が非常に小さいということです。重力が小さいため、どのようにローバを動かしたとしても表面から離れてしまいます。それなら最初から跳ねて移動する方法にしたらいいのではないかということになり、私が考案したのがこのホップ式の移動メカニズムです。ホップするといっても、上方向にホップするだけですと、また元の場所に戻ってきてしまいますので、横方向にホップさせる必要があります。どの方向にどれくらいの速さでホップするかという検証を、無重力を模擬した実験で何度も行いました。また、下が岩のような固い場所だったらどうなるか、あるいは、砂のような柔らかい場所だったらどうなるかといった実験も繰り返し行い、ちゃんと跳ねることを打上げ前に実証しました。
ミネルバが取得したデータは「はやぶさ」を中継して地球に送ります。「はやぶさ」がイトカワに接近した時、「はやぶさ」は地球から約3億kmも離れていますので、地球との通信の往復に40分近くかかります。地球からの指令が「はやぶさ」を経由してミネルバに届き、その後、ミネルバに届いたことが地球で確認できるのにそんなに時間がかかると、ミネルバを地球から操縦するのは非常に非効率的です。このため、ミネルバは完全に自律的に判断して行動できるように作りました。そのための搭載コンピュータソフトの開発にとても苦労をしました。ミネルバは、表面に貼られた太陽電池セルで発電した電力で動きますが、得られる電力は約2Wです。コンピュータの処理速度を速くしようとすると、消費電力が増えます。しかし、使える電力が限られているため、あまり速くできません。結果として、搭載コンピュータの能力は、皆さんが使っているコンピュータの100分の1以下しかありません。性能が低いコンピュータにいろいろな機能を入れ込むと、動作が遅くなったり、動かなくなったりしてなかなかうまくいきませんでした。その辺りが大変苦労した点です。
Q.これまで「はやぶさ」を運用してきた中で、最も印象深かったことは何ですか?
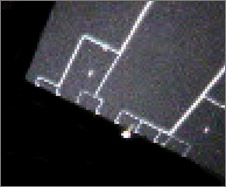
「ミネルバ」から撮影された「はやぶさ」探査機の太陽電池パドル
ミネルバを分離した時が一番印象に残っています。2005年11月12日、「はやぶさ」の降下リハーサル中にミネルバを分離しました。「はやぶさ」に向けてミネルバを分離するという指令を送り、私は、モニタの前で「はやぶさ」からの通信を待ちました。そして、約40分後、「ミネルバ分離」の確認がとれ、私は嬉しくて、みんなにミネルバの分離成功を伝えました。ところがです。その3時間後に事態が一変しました。
イトカワは12時間で1回自転をしています。小惑星の表面にミネルバが降りたとすると、それはイトカワの真昼くらいの時間帯でした。昼から夜になるまでにだいたい3時間です。夜になると、ミネルバの太陽電池セルに太陽光があたらないので通信が途絶えます。しかし、3時間以上経っても、ミネルバとの通信が確保されていました。ということは、小惑星の表面に到着していないということになります。
後の調査で、実際にミネルバが放出されたのは、小惑星からの距離が70mではなく、200mだったことが分かりました。しかも、放出時の「はやぶさ」は、毎秒15cmでイトカワから遠ざかっていました。これが一番の問題でした。もし、探査機が「はやぶさ」に近づいていれば、小惑星までの距離が200mあっても大丈夫だった可能性はあります。
ミネルバは小惑星には着地出来ず遠ざかっていきましたが、放出後18時間は安定した通信が確保されていました。私は、通信が途絶えた後も、もしかしたらミネルバから連絡がくるかもしれないと思い、2週間ほど中継器のスイッチを入れて待ち受けていました。しかし、結局その後は一度もミネルバからの電波をとらえることはありませんでした。ミネルバは、世界一小さい、591gの人工衛星になってしまいました。この1年以上の間に、温度差によってミネルバの電子機器が故障してしまったかもしれませんが、私は、まだ生きているという可能性を信じています。
Q.ミネルバが小惑星に着陸しなかったと知った時はどのように思われましたか?
英語で言うと「That's Life」ですね。それも仕方ないかなという感じです。ミネルバを小惑星に送るまでには、たくさんのことをクリアしなければなりません。ロケットの打上げを成功させ、探査機を無事に小惑星へ到着させる。そして、探査機を小惑星の近くまで安全に降ろす、ということをすべて成功させてから、やっとミネルバの出番になります。それぞれに難しさがあり、もしかしらた失敗するかもしれないという危険性はどこにでもあります。ですから、ミネルバがうまくいかなかったとしても、それはそれで仕方がない。また次を目指して頑張ろう、と思っただけです。
Q.「はやぶさ」がイトカワに到着する前と、実際に到着してからのイトカワの印象は違っていましたか?
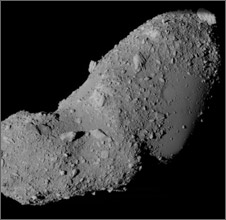
小惑星イトカワ
到着前は、イトカワの表面は比較的一様だと思っていました。ところが実際に行ってみると、一面砂だったり、岩がゴロゴロと露出していたりと、いろいろなところがあるのが分かりました。それを知って、ミネルバのようなロボットを作ったことに意味があったと思いました。もしイトカワの表面がどこも同じであったら、一カ所を集中的に調べればよいわけで、わざわざ表面を移動して観測する必要はなかったかもしれません。ですから、イトカワの多様な表面を見た時に、ミネルバのような移動型ロボットを作ってよかったと安心させられました。
Q.「はやぶさ」のミッションを通じて学んだことはありますか?
私は、1997年の大学院生の頃から「ミネルバ」の研究に参加し、その後、2000年に宇宙科学研究所(現JAXA宇宙科学研究本部)に就職をして本格的に開発に参加しました。「はやぶさ」に関わったのも、2000年以降です。今のところ、このミッションは、自分がかかわった最初で唯一の宇宙探査ミッションです。ですから、宇宙ミッションとはどういうものかを「はやぶさ」がすべて教えてくれました。特にミネルバに関しては、自分でやらなければならないことが多かったので、自分の手で衛星を作っているという感じがしました。衛星や探査機の重要な部分に関してはなかなか自分たちだけではできませんが、観測機器のようなレベルですと自分たちでできますし、実際に、ここ宇宙科学研究本部の人たちは自分たちで作っています。宇宙機といえども、自分たちで作るものなんだと思いました。ですから、「自分でものを作る」ということに関しては、ある程度の自信がついたと思います。また、どんな時でも最後まで調整してベストの状態にすること、絶対に諦めず、納得するまでやるんだという姿勢も、このミッションを通して学んだように思います。宇宙探査には、自由な発想やチャレンジすることが必要だと思いますが、「はやぶさ」は、宇宙プロジェクトの理想的な進め方を教えてくれました。
Q.「はやぶさ」の帰還に向けて、どのようなことを思われますか?

「ミネルバ」を分離した「はやぶさ」
(想像図 提供:池下章裕)
まずは、帰還の最初のステップである、イオンエンジンによる噴射がうまくいってほしいと思っています。ただ、帰還の道のりは約3年もありますので予断は許されません。開発チームの一員としては、これからも苦悩が続くという感じです。それが、成功したら喜びに変わるわけですが、それまでは、まだまだ試練が続くのでしょうね。
Q.先生の今後の夢はどのようなことですか?
私は子供の時からロボットに興味がありますので、基本的には、ロボットによる無人探査をしたいです。小惑星に限らず、月や火星、彗星など、地球以外の天体にいろいろなタイプのロボット探査機を送りたいです。
Q.未来の宇宙開発を担う子供たちにどのようなことを伝えたいですか?
宇宙というのは興味を持ちやすい分野であることは確かですが、別に宇宙でなくてもいいと思います。私も小さい頃は、どちらかというと、宇宙よりロボットや自動車に興味を持っていました。何でもいいので、自分で手を動かすことに興味を持ってもらえたら、とても素晴らしいと思います。教育改革や、理科離れなどが問題になっていますが、「理科を好きになりなさい」と言われて突然好きになるのは難しいと思います。自分で手を動かして作業をしているうちに、理科系の仕事に興味を持つようになれば、必然的に理科や数学にも興味を持ってくれるはずだと思います。ぜひ自分で何かを作ってほしいと思います。
JAXA宇宙科学研究本部。宇宙情報・エネルギー工学研究系助教授。工学博士。
2000年、東京大学大学院工学系研究科電子工学専攻博士後期過程修了。同年、旧文部省宇宙科学研究所助手に着任。2003年、同助教授となり現在に至る。博士論文として、小天体表面を自律的に探査するロボットシステムに関する研究を行い、この時の研究を「はやぶさ」搭載の超小型ロボット「ミネルバ」の開発に活かす。専門はロボティックス。現在は、次世代の小天体探査ロボットや月探査ロボット、超小型衛星などについて研究を進めている。
 |
 |
 |
 |
 |
 |
 |
 |