小型軽量テラヘルツ帯アンテナサブシステムを開発し、
飛行中の航空機と地上実験局との間で高速データ通信に成功
2025年(令和7年)5月30日
国立研究開発法人宇宙航空研究開発機構
学校法人早稲田大学
国立研究開発法人宇宙航空研究開発機構(理事長:山川 宏、以下「JAXA」)研究開発部門センサ研究グループらと、学校法人早稲田大学(理事長:田中 愛治、以下「早稲田大学」)理工学術院の川西 哲也教授の研究グループは、高高度プラットフォーム(以下「HAPS」)※1に搭載可能な小型軽量テラヘルツ帯※2のアンテナサブシステム(通信用アンテナ、アンテナ追尾システム)および受信機を開発し、高度約3kmを飛行中の航空機に搭載して、アンテナを地上に向けて自動追尾させながら、地上と上空間の高速大容量通信(データ通信速度4Gbps)を実証しました(図1)。高速飛行中の航空機と地上実験局との間のデータ通信において、テラヘルツ帯の電波を用いた高速大容量通信に成功したのは今回が世界初※3となります[1]-[6]。
©JAXA/早稲田大学
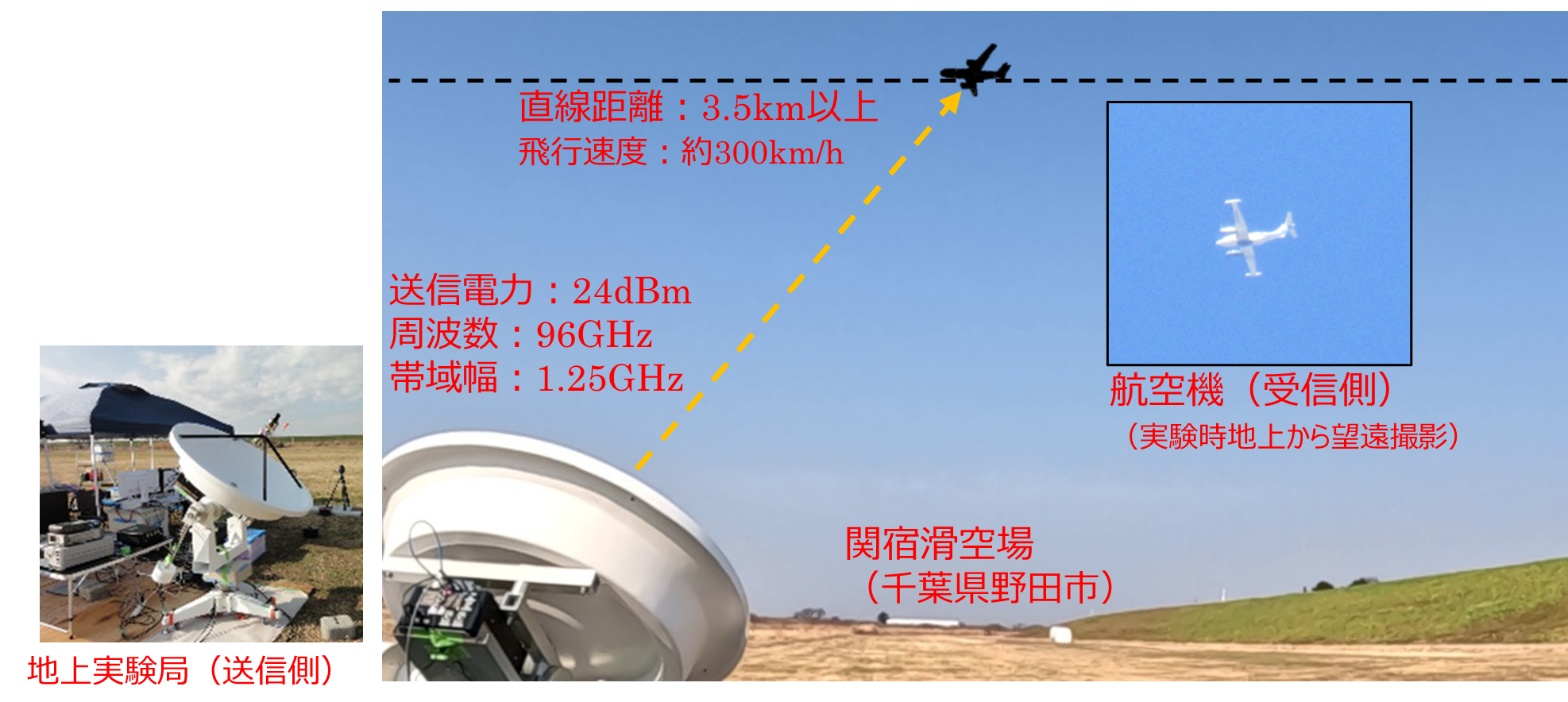
図1航空機と地上実験局間の通信実験イメージ
本研究で得られた成果をもとに、HAPSと地上との通信の大容量化が実現出来れば、地上で使用されているネットワーク回線(LAN)レベルの高速通信を上空まで延伸させたように活用することが可能になり、大規模災害時の広域通信基地局、山間部や離島への高解像度の映像の伝送など、上空の通信網を使った多様なサービスの創出が期待されます[7]。
【開発・実験の詳細】
本研究では、92GHzから104GHzのテラヘルツ帯をカバーする高利得アンテナ(利得40dBi以上)を、新たに開発した宇宙用の高精度な複合材(CFRP※4)にプラズマ溶射※5の技術を応用して電磁波反射面を形成するとともに、飛行する航空機から地上実験局が位置する定点方向に自動的にビームを誤差0.2度以下で向け続けることが出来るアンテナ追尾機構を開発しました(以下、アンテナサブシステムという)。
本アンテナサブシステムは、将来のHAPS搭載を目指した試作装置であるため、航空機搭載品としての安全性を満たすとともに、-52℃~+40℃の温度範囲で動作するように設計しました。また、アンテナ追尾のための可動機構部を含めた高利得アンテナ部全体(図2、機体外搭載品)の重量は20kg以下になっています。

©JAXA/早稲田大学
図2実験用航空機に搭載されたテラヘルツ帯の高利得アンテナと追尾機構部
通信実験では、実験用航空機(ダイヤモンドエアサービス社が運用するビーチクラフト式200T型を使用)の機体下部にある既設のレドーム※6内にアンテナサブシステムを搭載し、アンテナ自動追尾制御装置、テラヘルツ帯の通信実験装置は航空機のキャビン内に搭載しました(図3)。搭載された高利得アンテナは、アンテナ背面に取り付けた全地球航法衛星システム(GNSS)※7の受信機と慣性航法システム(INS)※8からの情報に基づき、飛行中に逐次、アンテナの方向を地上実験局に対して指向誤差が0.2度以下になるように自動制御しました。

©JAXA/早稲田大学
図3実験用航空機のキャビン内に設置したテラヘルツ帯の通信実験システム
今回の通信実験では、テラヘルツ帯の地上実験局(関宿滑空場千葉県野田市)用として1.2m口径のカセグレンアンテナを取り付けたアンテナ駆動架台を開発しました。地上実験局には、航空機のキャビンに搭載した通信実験装置と同じ構成となる通信実験装置を地上局アンテナと組合せて設置しました。本実験で使用した通信実験装置は、この実験に先行して地上で実施した長距離・大容量伝送実験(地上実証試験)[7]と同じものを使用しています。地上での伝送実験では、アンテナは固定されていましたが、本実験では、航空機の高度や姿勢変動の影響下で、高速で飛行する航空機から地上局を高精度に連続的に追尾させることが可能なアンテナ自動追尾制御装置の性能検証にも成功したことになります。
通信実験での周波数帯は95.375GHz~96.625GHz(中心周波数96GHz、帯域幅1.25GHz)とし、実験試験局の免許を取得し、地上実験局の空中線電力を約250mWに制限して通信試験を実施しました。
実験用航空機は地上実験局の北側2kmを東から西への方向の高度2,896mを直線飛行と旋回飛行させました。この場合、地上局と航空機の直線距離は最短で3.5kmとなります。なお、航空機の対地速度は300km/h前後でした。
©JAXA/早稲田大学
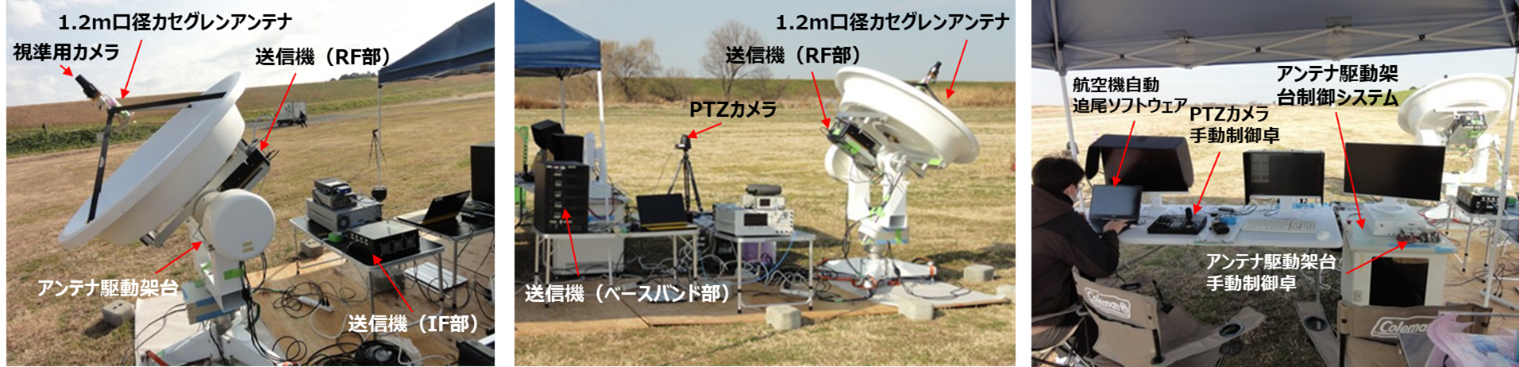
図4設営されたテラヘルツ帯地上実験局の様子
地上実験局のアンテナは、パン・ティルト・ズームのリモート制御機能を持つPTZカメラ(方向とズームを遠隔制御出来るカメラ)を用いて、撮影された航空機が画像の中央に位置するように航空機を自動追尾撮影するともに、地上実験局アンテナのビーム方向をPTZカメラの視野方向と同調させるように制御して、地上実験局アンテナの航空機追尾を行いました。
本通信実験では航空機と地上実験局との間に速度変化があるため、ドップラー効果で周波数が変化し、かつ、薄雲の影響で減衰量も変化する状態下で、帯域幅1.25GHzに対応するシンボルレート1Gシンボル/秒の条件において、変調方式QPSKおよび16APSKによる変復調動作での確認を行い、伝送速度4Gbpsの達成を確認しました。
次世代移動通信システムBeyond5G/6G※9システムにおいては、非地上系ネットワーク(NTN)※10と地上間の大容量通信を行うフィーダリンク※11の一部を、テラヘルツ帯を用いた高速通信が担うことが期待されています。我々の研究グループは、92.25GHz~103.75GHz間に帯域幅1.25GHz(4Gbps)の通信チャンネルを6チャンネル配分することで、伝送速度20Gbps以上のフィーダリンクを提案しています。テラヘルツ帯を用いることで、少雨時でも所要CN比※12が小さくなるような変調方式を自動選択させ、2Gbpsx6チャンネルにより10Gbpsの伝送速度を可能としています。
今後は、同時並行で開発を進めていた空中線電力1Wの増幅器を活用し、距離20kmにおいて伝送速度20Gbpsの通信達成に向けて研究を進めるとともに、HAPS等に搭載してフィーダリンクの実証を目指します。
【研究プロジェクトについて】
本研究成果の一部は、国立研究開発法人情報通信研究機構(NICT(エヌアイシーティー))の革新的情報通信技術研究開発委託研究(JPJ012368C00302およびJPJ012368C04901)、および科学技術振興機構の先端国際共同研究推進事業ASPIRE(JPMJAP2324)により実施したものです。
【各機関の主な役割】
JAXA : テラヘルツ帯の高利得アンテナサブシステムの開発 早稲田大学 : テラヘルツ帯に対応した送受信機の開発
【用語解説】
※1
HAPS
High-Altitude Platform Stationの略称。高度約20km上空の成層圏を数日〜数か月の長期間に渡って無着陸で飛行できる無人航空機を指します。
※2
テラヘルツ帯
おおむね周波数100GHzから10THz(波長にして3mm-30μm)の電磁波領域を指す。下限については、2019年に米連邦通信委員会(Federal Communications
Commission、FCC)が、新しい技術の開発やサービス展開に向けて、95GHzを超える周波数帯の利用に対する新ルールを発表していることから[3]、95GHz程度の周波数も含みます。
※3
世界初
地上と上空間の通信ではE帯(71GHzから86GHz)を使った通信実験例が最も高周波でした。今回の地上と上空間の通信実験では、W帯(95GHz)を利用して4Gbps以上の伝送速度を達成しており、テラヘルツ帯を含む周波数での地上と上空間の通信では世界初になります。
※4
CFRP
Carbon Fiber Reinforced
Plastics(炭素繊維強化プラスチック)の略称。炭素繊維を樹脂(主にエポキシ樹脂)で固めた複合材料を指します。軽くて強い、変形や熱膨張が少ない材料として、航空機、自動車などで使用されています。テラヘルツ帯の宇宙用アンテナでは広い温度範囲で形状の変形が少なくなるように、炭素繊維が一方向のものを繊維の方向を変えながら積層させて膨張や収縮が一様になるように製造し、さらに使用する樹脂の種類や炭素繊維の含有率を特別にチューニングしています。
※5
プラズマ溶射
プラズマアークを利用して溶かした金属材料を高速で基材に吹き付けて皮膜を形成させる技術のこと。
※6
レドーム
レドーム(radome)は、レーダなどのアンテナを格納し、風雨や太陽光から保護するためのカバーを指します。航空機用のレドームはアンテナを高速の気流から防御した上で機体の空気抵抗を小さくする形状をしています。レドームの素材には電波の透過率が高いグラスファイバーやポリテトラフルオロエチレン(PTFE)などの誘電体が用いられます。
※7
全地球航法衛星システム(GNSS)
Global Navigation Satellite System(全地球測位衛星システム)の略で、GPSを含む複数の人工衛星からの電波を利用して現在位置を計測するシステムを指します。
※8
慣性航法システム(INS)
INS (Inertial Navigation System: 慣性航法装置)は、慣性空間における運動加速度及び角速度を検出して、航空機 の現在位置と速度を計測する装置を指します。
※9
Beyond5G/6G
近年、普及が進む移動通信システムは第5世代(5G)とよばれています。これに対して、次世代システムのBeyond5Gでは第6世代(6G)の移動体通信システムでは、5Gと比べ、「10倍から100倍の大容量」、「1/10の低遅延」、「10倍の多数同時接続」、「1/100の低消費電力」の実現を目指しています。
※10
非地上系ネットワーク(NTN:Non-Terrestrial Network)
地上、海、空にある移動体間を多層的につなげる通信ネットワークシステムのことを指します。
※11
フィーダリンク
地上局をゲートウェイとして高度プラットフォームシステムなどの飛行体や衛星との間で通信を行う一対一の大容量通信回線のこと。
※12
CN比
通信における搬送波と雑音の強度比(キャリア対雑音比)で、信号の品質を示す指標のことで値が大きいほど良い品質となる。
【参考文献】
[1]
HAPSモバイル、“世界初!HAPSモバイルとLoon、成層圏飛行中のLTE通信に成功~Sungliderのテストフライト中に、無線機を通してビデオ通話を実施~外部リンク”、2020年10月
[2]
国立研究開発法人情報通信研究機構、プレスリリース、“世界初、高度約4km上空から38GHz帯電波での5G通信の実証実験に成功外部リンク”、2024年5月
[3]
NTTdocomo、“ケニア上空の高度約20kmの成層圏を飛行するHAPSを介したスマートフォンへのデータ通信実証に成功外部リンク”、2025年3月
[4]
H. Kitanozono, J. Suzuki, Y. Kishiyama, Y. Hokazono, T. Sotoyama, M. Ouchi, R. Miura, and H. Tsuji, “Development of high altitude platform station backhaul system using 38GHz band frequency,” in 2021 IEEE VTS 17th Asia Pacific Wireless Communications Symposium (APWCS), Japan, 2021, pp. 1-5.
[5]
G. Otsuru, H. Tsuji, R. Miura, J. Suzuki, and Y. Kishiyama, “Efficient antenna tracking algorithm for HAPS ground station in millimeter-wave,” in 2022 25th International Symposium on Wireless Personal Multimedia Communications (WPMC), Denmark, 2022, pp. 261-266.
[6]
Q. Tang, A. Tiwari, I. del Portillo, M. Reed, H. Zhou, D Shmueli, G. Ristroph, S. Cashion, D. Zhang, J. Stewart, P. Bondalapati, Q. Qu, Y. Yan, B. Proctor, and H. Hemmati., “Demonstration of a 40Gbps bi-directional air-to-ground millimeter wave communication link,” in IEEE MTT-S International Microwave Symposium (IMS), 2019, pp. 746-749.
[7]
早稲田大学、宇宙航空研究開発機構、“テラヘルツ帯に対応した無線通信システムを試作し、95GHz帯を用いた長距離・大容量伝送に成功”、2025年3月