トピックス一覧
2022年2月28日更新
リュウグウ試料の研究公募受付開始
リュウグウ試料 AO(Announcement of Opportunity)システムにて、研究公募の受付を開始しました。
プロポーザル投稿予定の皆様は、3月25日までのアカウント登録をお願いいたします。
2022年2月14日更新
小惑星探査機「はやぶさ2」のリターンサンプルに関する研究論文の「Science」誌掲載について
小惑星探査機「はやぶさ2」のリュウグウ観測・サンプル分析の研究成果が、2月10日(米国東部時間)、米国の科学誌「Science」誌にオンライン掲載されました。
詳細はこちらへ。
2022年1月25日更新
小惑星探査機「はやぶさ2」帰還カプセル及びリュウグウサンプル展示の協力団体公募について(募集要項)
宇宙航空研究開発機構(JAXA)は、小惑星探査機「はやぶさ2」帰還カプセル及びリュウグウサンプルの2022年度展示協力団体を募集します。2021年度展示にあった帰還カプセルに加え、2022年度展示には、リュウグウサンプルの実物をご覧いただける観覧セットが追加となりました。
「はやぶさ2」が持ち帰ったリュウグウサンプルは、現在、JAXA相模原キャンパスのキュレーション設備をはじめ、様々な機関で分析作業が進んでいます。この貴重なサンプルと帰還カプセル本体を、多くの方々にご覧いただくとともに、最新の分析、研究成果などをご紹介する機会を通じて、特に若い世代に、宇宙の謎を探究すること、科学や技術を追求すること、さらには、チームワークで挑戦することの楽しみを実感していただきたいと考えております。
なお、展示にあたっては、新型コロナの感染症対策を徹底して実施いただきますようお願いいたします。また、感染状況によっては貸出・展示の実施を見直す可能性があることをご了承いただきますよう、お願いいたします。
2021年12月21日更新
小惑星探査機「はやぶさ2」帰還試料の初期記載に関する研究論文の「Nature Astronomy」誌掲載について
2020年12月に「はやぶさ2」により帰還した「リュウグウ」試料の初期記載に関する研究論文が、
イギリスのオンラインジャーナル「Nature Astronomy」誌に2021年12月21日(日本時間)に
掲載されました。
詳細はこちらへ
2021年7月6日更新
小惑星探査機「はやぶさ2」帰還カプセル 巡回展示先について
宇宙航空研究開発機構(JAXA)は、4月27日から5月21日までの期間に募集いたしました "「はやぶさ2」帰還カプセル展示協力団体公募" につきまして、下記のとおり、展示協力をいただく団体を選定させていただきました。
| 1. 展示協力団体 | :21団体 |
|---|
※ 巡回スケジュールと開催先については、下記 または【別紙 [PDF: 64KB]】をご参照ください
| 2. 巡回期間 | :2021年9月初旬〜2022年3月下旬 |
|---|---|
| 3. 応募総数 | :28団体(北海道2、東北2、関東9、北陸3、中部4、近畿2、中国1、四国1、九州4) |
| 4. 選定方法 | :地域のバランス、輸送ルートの最適化を考えJAXA内選考委員会にて選定させていただきました。 |
小惑星リュウグウへの6年の旅を終え、地球に帰還したカプセルの勇姿を、この機会にぜひご覧ください。
2021年2月22日更新
小惑星探査機「はやぶさ2」帰還カプセル公開【相模原市立博物館・国立科学博物館】
このたび、相模原市立博物館・国立科学博物館にて、小惑星探査機「はやぶさ2」が地球へ届けた再突入カプセルを公開いたします。
カプセルの各部パーツを展示するとともに、「はやぶさ2」が成功させた6年間にわたるミッションの軌跡をご紹介します。

2020年12月18日更新
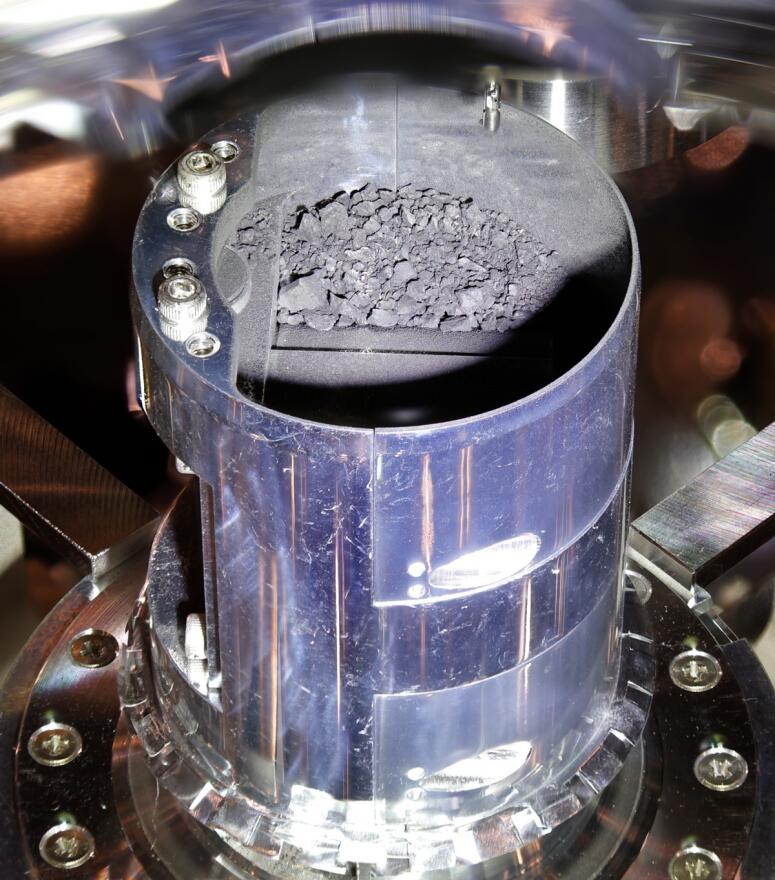
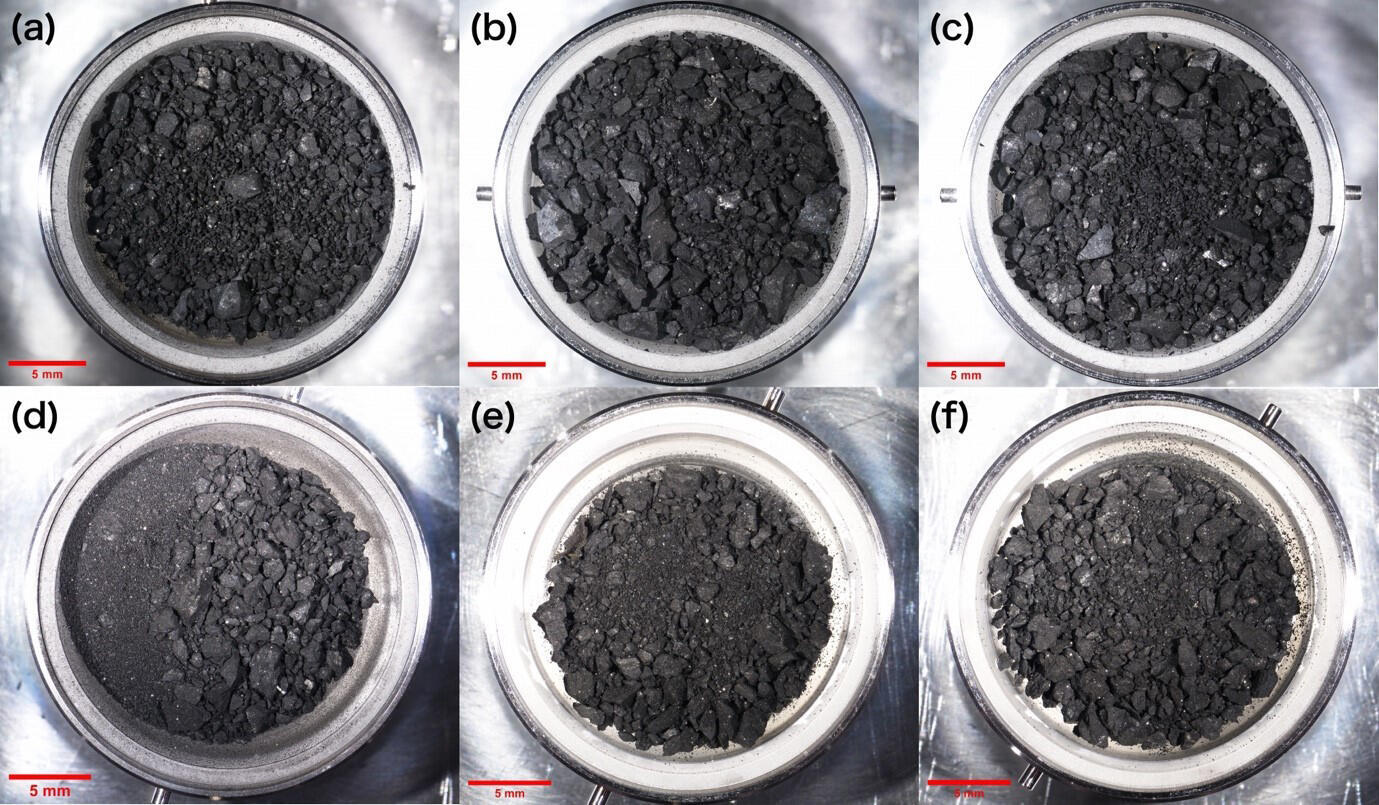
小惑星探査機「はやぶさ2」が採取した小惑星Ryugu(リュウグウ)サンプルは約5.4グラム
小惑星探査機「はやぶさ2」再突入カプセルにより地球帰還した小惑星Ryugu(リュウグウ)サンプルの重量が約5.4グラムであることがわかりました。
これは、2020年12月18日にJAXA相模原キャンパス内地球外試料キュレーションセンターにて、小惑星探査機「はやぶさ2」再突入カプセルより取り出したサンプルコンテナ内の「サンプルキャッチャー」全体としてサンプル込みで秤量することにより、打上げ前の「サンプルキャッチャー」重量との差分から、採取したサンプルのおおよその総重量(A、B、C室内サンプルの合計)を算出しました。これには12月14日にサンプルコンテナの底面に確認した「サンプルキャッチャー」外のサンプル量は含まれません。
「はやぶさ2」設計時の目標サンプル収量として、初期分析で必要な科学分析を実施できるだけの量としていた0.1グラムを大きく超えるサンプル量が採取できていたことになります。
今後、引き続き「サンプルキャッチャー」内のA室、B室、C室、サンプルコンテナ内ごとにサンプルの観察・重量計測などの分析作業を進めてまいります。
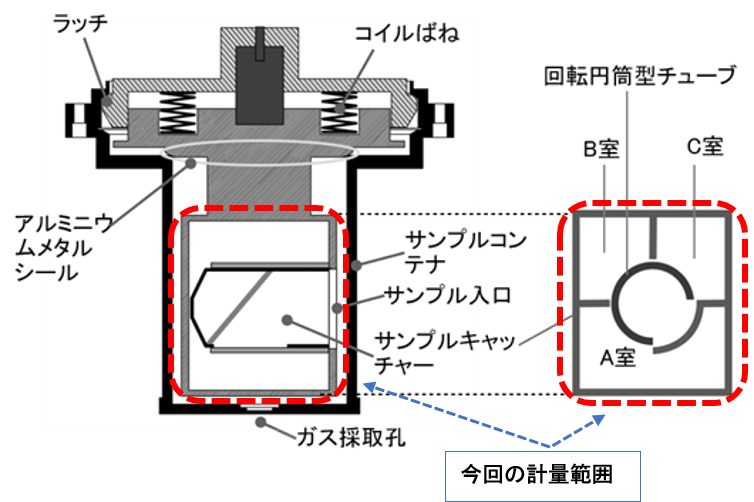
【サンプルコンテナの構造】

【サンプルキャッチャーA室内に確認されたRyuguサンプル(12/15撮影)】
2020年12月7日更新
「はやぶさ2」サンプルコンテナからのガス採取について

2020年12月6日更新
小惑星探査機「はやぶさ2」搭載カプセルの現地本部への輸送完了について

2020年12月6日更新
小惑星探査機「はやぶさ2」搭載カプセルの捜索結果について



2020年12月5日更新
小惑星探査機「はやぶさ2」搭載カプセルの分離確認について
小惑星探査機「はやぶさ2」搭載カプセルについて、テレメータ及びドップラーデータにより、カプセルが計画どおり分離されたことを、日本時間2020年12月5日14時35分に確認しました。
2020年12月1日更新
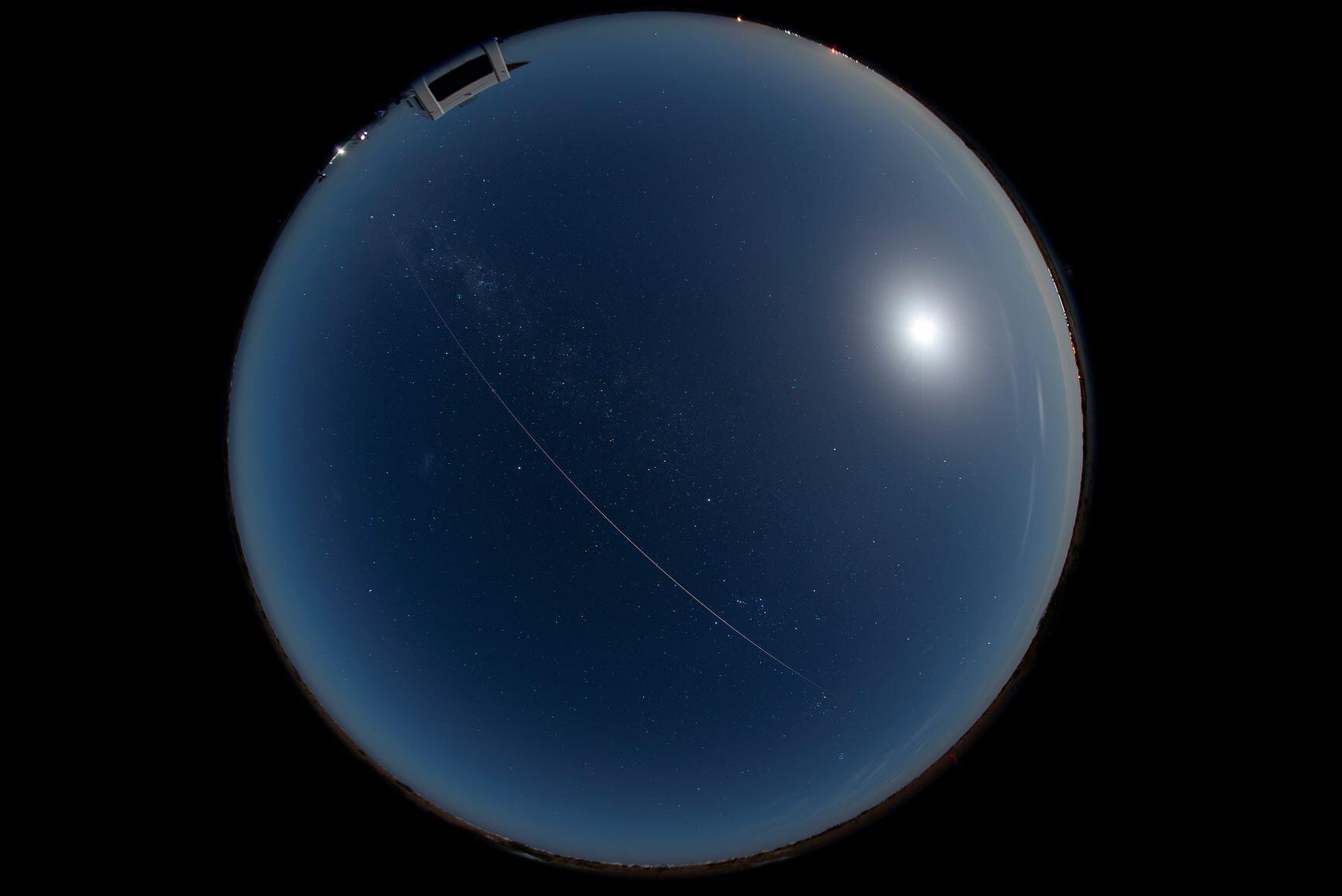
再突入カプセルの観測についての情報
オーストラリアのウーメラに戻ってくる再突入カプセルを観測するための情報をまとめました。また、「Reentry AR」という任意の場所から見た再突入カプセルの予測軌跡をAR(拡張現実)で表示するアプリ(JAXA監修)がToriningen社よりリリースされています。無料でダウンロードできますのでご利用ください。
[詳細はこちら]
2020年10月7日更新
美笹深宇宙探査用地上局におけるX帯電波の送信について

国立研究開発法人宇宙航空研究開発機構(JAXA)は、現在開発を進めている美笹深宇宙探査用地上局(54m大型パラボラアンテナ)において、10月5日19:30~22:30(日本時間)にかけて、小惑星探査機「はやぶさ2」へのX帯(電波の周波数帯域の一つ:7GHz帯)による指令信号の送信に成功しました。
[詳細はこちら]
2020年9月25日更新
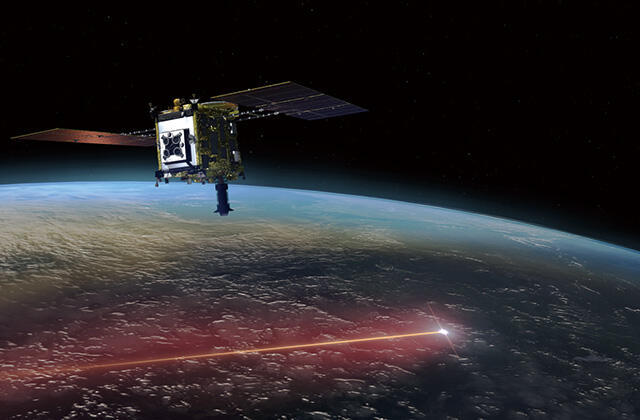
地球-リュウグウ間のイオンエンジン による往復運転完了

10ヶ月前、慣れ親しんだ小惑星リュウグウを離れ、地球帰還へのイオンエンジンを続けてきた はやぶさ2は、2020年9月17日午前3時15分45秒(日本時間、以下同様)にイオンエンジンシステムを計画通り停止し、往復のべ22,348時間に及ぶ地球往復のイオンエンジン運転を完了しました。
最終日のイオンエンジン運転は地球帰還軌道に接続するための精密な軌道修正(TCM-0)であったため、通常のイオンエンジン運転と異なり非常に精密な推力制御が求められました。イオンエンジンの停止時刻を微調整し、探査機の速度を計画値にぴったり合わせる必要があります。
[詳細はこちら]
2020年9月16日更新
「はやぶさ2」地球帰還 応援メッセージ

「はやぶさ2」地球帰還 応援メッセージに数多くの素敵なメッセージをありがとうございます!
[詳細はこちら]
2020年8月19日更新
カプセル着陸許可発行!
「はやぶさ2」の再突入カプセル(リエントリーカプセル)は、今年の12月6日にオーストラリアのウーメラ立入制限区域(プロジェクトでは「ウーメラ砂漠」とも呼んでいます)に着地させるという計画で、オーストラリア政府などと協議を進めてきましたが、このたびオーストラリア政府から着陸許可が発行されたという連絡がありました。
[詳細はこちら]
2020年5月22日更新
[はやぶさ2プロジェクト] 海外メンバーからのメッセージ
![[はやぶさ2プロジェクト] 海外メンバーからのメッセージ](https://www.jaxa.jp/projects/sas/hayabusa2/images/topics_20200522_hayabusa2.jpg)
第2期のイオンエンジン運転が5月12日から始まりましたが、この運用開始を海外の「はやぶさ2」プロジェクトメンバーに伝えたところ、たくさんのメッセージが送られてきました。特に、現在の新型コロナウイルスで世の中全体が大変な状況において、非常に勇気づけられるメッセージですので、ご紹介します。
[詳細はこちら]
2020年2月28日更新
「第8回技術経営・イノベーション大賞」にて「はやぶさ2」プロジェクトが科学技術と経済の会会長賞を受賞
(一社)科学技術と経済の会が主催する「第8回技術経営・イノベーション大賞」にて「はやぶさ2」プロジェクトが科学技術と経済の会会長賞を受賞いたしました。
「はやぶさ2」はその小惑星到達と物質採取達成のために行った組織体制のフラット化や議論と意思決定の透明化等の点において今回高い評価をうけ受賞となりました。


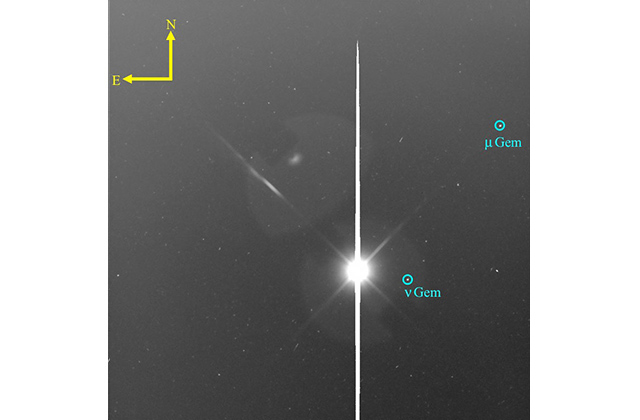
2019年11月13日更新
[はやぶさ2プロジェクト] さよならリュウグウ:リュウグウ出発航法画像のリアルタイム配信
![[はやぶさ2プロジェクト] さよならリュウグウ:リュウグウ出発航法画像のリアルタイム配信](https://www.jaxa.jp/projects/images/topics_20191113_hayabusa2.jpg)
リュウグウ出発航法画像のリアルタイム配信を11月13日~18日に行います。
[詳細はこちら]
2019年9月3日更新
[はやぶさ2プロジェクト] ターゲットマーカ分離運用の延期について
![[はやぶさ2プロジェクト] ターゲットマーカ分離運用の延期について](https://www.jaxa.jp/projects/sas/hayabusa2/images/topics_20190903_tm.jpg)
9月5日に予定されていた「ターゲットマーカ分離運用」は、探査機がセーフホールド(※)状態になりましたので延期となりました。なお、探査機の状態は正常です。
経緯は以下のとおりです。
はやぶさ2は、姿勢制御のための装置として、リアクションホイールを4個搭載しており、通常は3個のリアクションホイールを使って姿勢制御が行われています。8月29日に、昨年の10月以来使用していなかったバックアップのリアクションホイールの動作試験を実施したところ、リアクションホイールに異常値(トルク値の増加)を検出したため、探査機は自律的にセーフホールド状態に移行しました。この原因の詳細は現在調査中です。8月30日には復帰作業を行い、探査機は通常の状態に戻りました。ただし、セーフホールドによってホームポジションから離れてしまいましたので、現在、ホームポジションに戻す作業を行っています。ホームポジションには、今週末に戻る予定です。
[詳細はこちら]
2019年6月27日更新
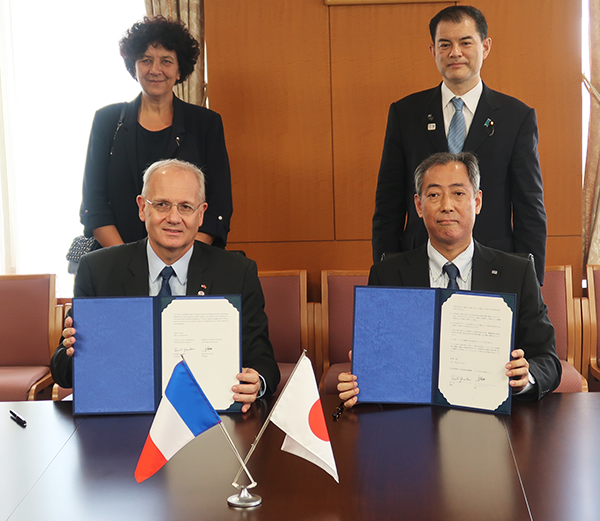
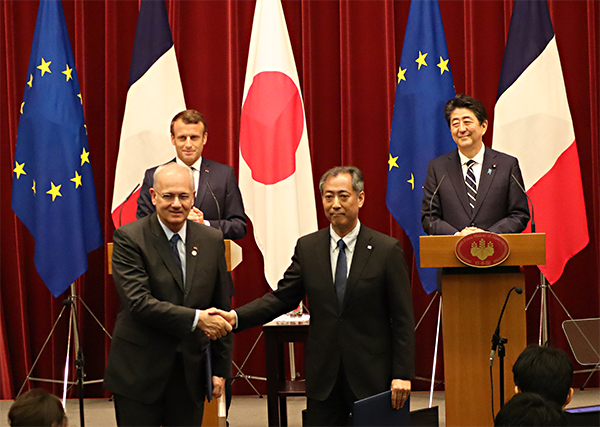
フランス国立宇宙研究センター(CNES)との火星衛星探査計画(MMX)、および、小惑星探査機「はやぶさ2」に関する実施取り決めの締結について
国立研究開発法人宇宙航空研究開発機構(JAXA)は6月26日、フランス国立宇宙研究センター(CNES)と、現在JAXAで検討中の火星衛星探査計画(MMX)における協力、および、小惑星探査機「はやぶさ2」が回収する試料分析に関する協力に合意し、JAXA理事長 山川宏およびCNES総裁 ジャン=イヴ・ル・ガル氏が両協力の実施取り決めに署名いたしました。
両実施取り決めについては、エマニュエル・マクロン(Mr. Emmanuel Macron)フランス共和国大統領の来日の機をとらえ、安倍首相及びマクロン大統領の御臨席のもと、首相官邸にて交換を行いました。
「火星衛星探査計画(MMX)ミッション検討に関する共同活動についての実施取決め」について
火星衛星探査計画(Martian Moons eXploration: MMX)の概要
MMXは、火星のフォボスとダイモスと呼ばれる2つの衛星を観測し、うちひとつの衛星から表層物質を採取して地球に帰還する計画で、火星衛星の起源および火星圏の進化の過程を明らかにすることや、今後の惑星・衛星探査に必要となる技術を向上させることを目的としています。
MMXは現在探査機の開発に向けた検討を進めており、2024年度の打ち上げを目指しています。
実施取り決めの概要
CNESから、MMX探査機に搭載する近赤外分光計(MacrOmega)、飛行力学の知見、小型ローバーの提供を受けることについて、開発に向けた準備段階の共同検討を行うことを規定したものです(小型ローバーについては、CNESとドイツ航空宇宙センター(DLR)が共同で検討中)。
関連リンク
「JAXA地球外試料キュレーションセンターにおけるMicrOmegaでのはやぶさ2帰還試料分析に関する協力活動についての実施取り決め」について
小惑星探査機「はやぶさ2」の概要
「はやぶさ2」は、「はやぶさ」の後継機で、C型の小惑星「Ryugu」(リュウグウ)を探査し、サンプルを持ち帰ることで、地球誕生の謎に加えて、海の水の起源や生命の原材料となった有機物の起源を探るミッションです。
「はやぶさ2」は、2014年12月3日に打ち上げられ、2018年6月に小惑星に到着し表面サンプルの採取を実施。2020年末に地球に帰還する予定です。
実施取り決めの概要
「はやぶさ2」が地球に帰還させる小惑星サンプル分析の性能向上を図るため、JAXAが整備する地球外試料キュレーションセンターにおいて、CNESから設備に組み込む赤外分光顕微鏡(MicrOmega)の提供を受けること、JAXAが取得するデータの共有・管理方法を共同で確立することなどを規定したものです。
関連リンク
2019年6月19日更新
[はやぶさ2プロジェクト] 第2回タッチダウンへのアプローチ −その1:タッチダウン地点付近の観測−
![[はやぶさ2プロジェクト] 第2回タッチダウンへのアプローチ −その1:タッチダウン地点付近の観測−](https://www.jaxa.jp/projects/sas/hayabusa2/images/tn_topics_20190619_pptd_approach1.jpg)
今年の2月22日に1回目のタッチダウンを行いましたが、その後、はやぶさ2プロジェクトでは、新たな挑戦として4月5日に衝突装置によって人工クレーターを作ることに成功しました。このことにより、小惑星リュウグウにおける残された最後の大きなミッションは、リュウグウの地下物質の採取になります。そのためには、2回目のタッチダウンを行う必要がありますが、第2回タッチダウンに向けて、プロジェクトでは着々と準備を進めてきました。現時点では、タッチダウンを行うかどうかはまだ決まっていませんが、ここでは「第2回タッチダウンへのアプローチ」ということでご紹介します。
2019年4月24日更新
[はやぶさ2プロジェクト] 「クレーター探索運用(事後)」(CRA2)について
![[はやぶさ2プロジェクト] 「クレーター探索運用(事後)」(CRA2)について](https://www.jaxa.jp/projects/sas/hayabusa2/images/topics_20190424_cra2_schedule.jpg)
衝突装置(SCI)の運用は4月5日に行われ、成功しました。衝突装置から発射された銅の塊(2kg)はリュウグウに衝突し、リュウグウ表面から砂礫が放出されたようすが分離カメラ(DCAM3)で撮影されています。しかし、DCAM3の画像では、リュウグウ表面がどのように変化したのかは分かりません。そこで探査機の高度を下げて、SCIが衝突した付近の観測を行います。
CRA2運用は2019年4月23日~25日です。23日は降下準備作業、24日に降下を開始、25日に最低高度(約1.7km)に達して観測を行い、25日のうちに上昇します。
2019年4月19日更新
[はやぶさ2プロジェクト] サイエンス誌に論文が掲載されました
これまでリモートセンシング機器によって、小惑星リュウグウの詳しい調査が進められてきましたが、その最初の結果をまとめた3編の論文が科学雑誌サイエンス誌に3月19日(日本時間では3月20日)にオンライン掲載されました。3編の論文のタイトルは次のようになります。
S. Watanabe et al. 2019, "Hayabusa2 arrives at the carbonaceous asteroid 162173 Ryugu — a spinning-top-shaped rubble pile", Science, 19 March, 2019
和訳:「はやぶさ2」が到着した炭素質小惑星162173リュウグウ―コマ型ラブルパイル
論文:DOI: 10.1126/science.aav8032
K. Kitazato et al. 2019, "The surface composition of asteroid 162173 Ryugu from Hayabusa2 near-infrared spectroscopy", Science, 19 March, 2019
和訳:「はやぶさ2」の近赤外分光観測による小惑星リュウグウの表面組成
論文:DOI: 10.1126/science.aav7432
S. Sugita et al. 2019, "The geomorphology, color, and thermal properties of Ryugu: Implications for parent-body processes", Science, 19 March, 2019
和訳:リュウグウの表面地形、多色画像、熱物性から探る母天体の進化
論文:DOI: 10.1126/science.aaw0422
[詳細はこちら]

LPSCでの「はやぶさ2」プレスカンファレンス後の集合写真。2019年3月19日撮影。
左から、杉田精司、平林正稔、Ralph Milliken、Deborah Domingue、渡邊誠一郎、吉川真、津田雄一(敬称略)。
(写真クレジット:Lunar and Planetary Institute)
2019年4月3日更新
[はやぶさ2プロジェクト] SCI(衝突装置)運用スケジュール
![[はやぶさ2プロジェクト] SCI(衝突装置)運用スケジュール](https://www.jaxa.jp/projects/sas/hayabusa2/images/topics_20190403_sci_schedule.jpg)
2019年4月3日更新
[はやぶさ2プロジェクト] SCI運用へ応援メッセージをいただきました
![[はやぶさ2プロジェクト] SCI運用へ応援メッセージをいただきました](https://www.jaxa.jp/projects/sas/hayabusa2/images/topics_20190403_messages.jpg)
2019年3月28日更新
[はやぶさ2プロジェクト] 「はやぶさ2」のイラスト改訂
![[はやぶさ2プロジェクト] 「はやぶさ2」のイラスト改訂](https://www.jaxa.jp/projects/sas/hayabusa2/images/topics_20190328_illustration.jpg)
2019年3月16日更新
[はやぶさ2プロジェクト] 「クレーター探索運用(事前)」(CRA1)について
![[はやぶさ2プロジェクト] 「クレーター探索運用(事前)」(CRA1)について](https://www.jaxa.jp/projects/sas/hayabusa2/images/tn_topics_20190316_CRA1.jpg)
現時点で、衝突装置の運用(SCI運用)は4月初めの週に予定されています。SCI運用の目的は、リュウグウ表面にクレーターを作ることですが、SCI運用の前と後のリュウグウ表面を比較することが重要です。そこで、SCI運用を行う前に、衝突装置でクレーターが生成されそうな領域の観測を行うことにしました。これが、「クレーター探索運用(事前)」(CRA1)です。SCI運用後にも同様な観測運用を行いますが、それは「クレーター探索運用(事後)」(CRA2)となります。
2019年2月25日更新
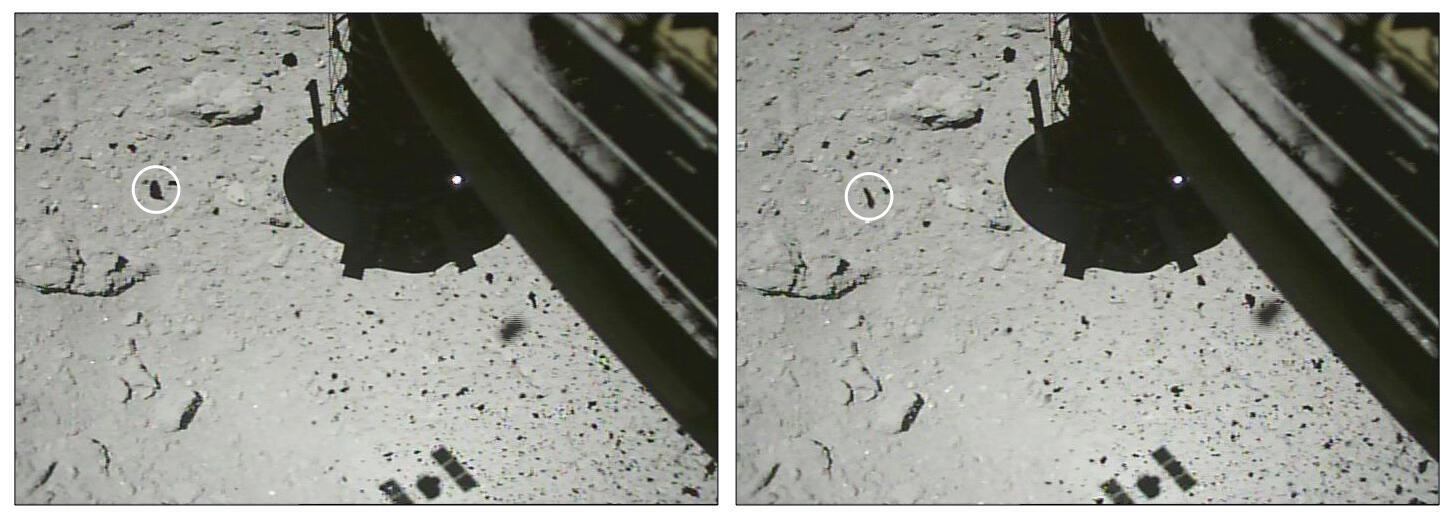
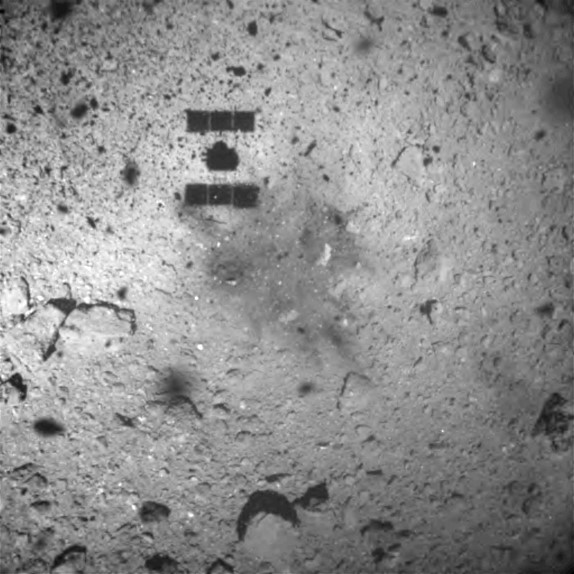
[はやぶさ2プロジェクト] タッチダウン直後の画像
![[はやぶさ2プロジェクト] タッチダウン直後の画像](https://www.jaxa.jp/projects/images/topics_20190225_td1_w1image.jpg)
「はやぶさ2」のタッチダウン運用(TD1-L8E1)を、2月20日~22日に行いました。タッチダウン後の上昇中に広角の光学航法カメラ(ONC-W1)で撮影した画像を図1に示します。
図1は、タッチダウンから約1分後に撮影したもので、撮影高度は約25m(誤差数m)と推定されます。探査機の影の下の部分の色が周りと異なっていますが、タッチダウンによって変色した部分です。変色した理由は現時点では不明ですが、スラスターや弾丸(プロジェクタイル)によって舞い上がった砂によるという可能性も考えられます。
図1
タッチダウン直後にタッチダウン地点付近を撮影した画像。広角の光学航法カメラ(ONC-W1)によって、機上時刻で2019年2月22日07:30頃(日本時間)に撮影された。
(画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研)
2019年2月22日更新
小惑星探査機「はやぶさ2」、第1回目のタッチダウン成功について
小惑星探査機「はやぶさ2」は、リュウグウの中心から約20km上空のホームポジションの位置にいて、タッチダウンの運用を開始しました。
2月22日(金)、JAXAは、小惑星探査機「はやぶさ2」を小惑星Ryugu(リュウグウ)へ接地(タッチダウン)させ、リュウグウの試料を採取する運用を実施しました。
「はやぶさ2」から送られてきたデータを確認した結果、サンプル採取のためのプロジェクタイル(弾丸)の発射を含む「はやぶさ2」のタッチダウンのためのシーケンスが実施されたことが確認できました。「はやぶさ2」の状態は正常であり、今般、リュウグウへのタッチダウンを成功させることができました。
タッチダウン直後の画像、ONC-W1による撮影
撮影時刻:2019/02/22 07:30頃(機上時刻)
高度:30m以下
画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研
2019年2月20日更新
[はやぶさ2プロジェクト] タッチダウン地点
![[はやぶさ2プロジェクト] タッチダウン地点](https://www.jaxa.jp/projects/images/topics_20190220_tdpoint.jpg)
これまで、「はやぶさ2」の運用は順調に行われてきました。「はやぶさ」では実現できなかった小型ローバを小惑星リュウグウに着陸させることにも成功しました。そして、もう1つ「はやぶさ」で想定通りには実現できなかったことであるタッチダウンに、2019年2月22日に挑戦することになります。
2019年2月20日更新
[はやぶさ2プロジェクト] 2019年1月のB0X-B運用での撮影画像
![[はやぶさ2プロジェクト] 2019年1月のB0X-B運用での撮影画像](https://www.jaxa.jp/projects/images/topics_20190220_boxb.jpg)
いよいよタッチダウンを迎えますが、その前に、1月に行いましたBOX-B運用での画像をお見せしたいと思います。
BOX-B運用とは、探査機の高度(リュウグウからの距離)は約20kmに保ったまま、探査機の位置を南北方向や東西方向に移動させてリュウグウを異なる角度から観測する運用のことです。
2019年2月20日更新
[はやぶさ2プロジェクト] 温かい応援、ありがとうございます
![[はやぶさ2プロジェクト] 温かい応援、ありがとうございます](https://www.jaxa.jp/projects/images/topics_20190220_messages.jpg)
「はやぶさ2」プロジェクトでは、多くの皆さんから応援メッセージをいただいています。非常に多くの皆さんから応援していただいており、プロジェクトメンバー一同、感激しているとともに、励みになっています。
2019年2月18日更新
「はやぶさ2」タッチダウン運用!ライブ配信は22日(金)6:45から!

小惑星探査機「はやぶさ2」は、現在、リュウグウの中心から約20km上空のホームポジションの位置にいて、タッチダウンの運用を開始します。 このタッチダウン運用の様子をライブ中継(配信)いたします。
| 放送予定日時: | 平成31(2019)年2月22日(金)6時45分~9時15分頃 |
|---|---|
| ライブ中継 : | YouTube・JAXA Channelにて中継予定 https://www.youtube.com/watch?v=WmPQmVVtE5A |
2019年2月14日更新
[はやぶさ2プロジェクト] リュウグウに弾丸を撃ち込め!
![[はやぶさ2プロジェクト] リュウグウに弾丸を撃ち込め!](https://www.jaxa.jp/projects/images/topics_20190214_Experiment.jpg)
去る12月28日、2018年仕事納めの日にサンプラチームはある重要な試験を実施しました。小惑星リュウグウの表面を模擬した土壌に本物と全く同じ弾丸を撃ち込み、どのくらいのサンプルをイジェクタとして飛ばすことができるか、サンプラチームとしてタッチダウン(TD)前の最後の確認試験です。
2019年2月1日更新
[はやぶさ2プロジェクト] MINERVA-II1の着地点名の訂正について
![[はやぶさ2プロジェクト] MINERVA-II1の着地点名の訂正について](https://www.jaxa.jp/projects/images/topics_20190201_Nomenclature.jpg)
小型探査ローバMINERVA-II1の着地点名につきまして、2018年12月13日に「トリニトス(Trinitas)」と発表しましたが、「トリトニス(Tritonis)」と訂正いたします。
2019年1月31日更新
あかつきチームからはやぶさ2チームへのメッセージが公開されました
はやぶさ2プロジェクトは長く困難な旅を終えて小惑星リュウグウに到着し、今まさにタッチダウン運用という極めて難しい試みに挑戦されようとしています。あかつきプロジェクトは、厳しい訓練と緻密な計画によってここまでやってこられた、はやぶさ2プロジェクトに心から敬意を表し、その成功をお祈りします。
2019年1月21日更新
[はやぶさ2プロジェクト] リュウグウ表面の地名が決定!
![[はやぶさ2プロジェクト] リュウグウ表面の地名が決定!](https://www.jaxa.jp/projects/images/topics_20190121_ryugunomenclature.jpg)
リュウグウ表面の地名がIAU(国際天文学連合)のDivision F(Planetary System and Bioastronomy)のWorking Group for Planetary System Nomenclatureで審議され、2018年12月に承認されました。地名の紹介と決定までの経緯についてご紹介します。
2018年12月25日更新
[はやぶさ2プロジェクト] 合運用の探査機軌道
![[はやぶさ2プロジェクト] 合運用の探査機軌道](https://www.jaxa.jp/projects/images/topics_20181225_Conjunction.jpg)
「はやぶさ2」は、2018年11月下旬から12月末まで合(ごう)運用を行っています。ここでの「合(ごう)」とは、地球から見たときに探査機が太陽とほぼ重なる方向にある状況を指します。天文学における「合」と同じ意味です。合になると、太陽が放射する電波や太陽周辺のプラズマによって探査機との通信が難しくなる場合があります。このため、合の期間には、リュウグウへ降下するような運用は行いません。
2018年12月21日更新
[はやぶさ2プロジェクト]アストロダイナミクスと重力測定降下運用
![[はやぶさ2プロジェクト]アストロダイナミクスと重力測定降下運用](https://www.jaxa.jp/projects/images/topics_20181221_AstroDynamics.jpg)
これまでの「はやぶさ2」の運用のうちあまり報告がされていなかったことの1つにアストロダイナミクスがあります。宇宙工学では、宇宙機の運動や姿勢、軌道などを扱う飛行力学全般のことを「アストロダイナミクス」と呼んでいます。たとえば、2018年8月に行った重力測定降下運用で活躍しました。
2018年12月13日更新
[はやぶさ2プロジェクト]MINERVA-II1ローバの命名について
![[はやぶさ2プロジェクト]MINERVA-II1ローバの命名について](https://www.jaxa.jp/projects/images/topics_20181213_MNRV-II1.jpg)
2018年9月21日(日本時間)に「はやぶさ2」探査機から分離した2台のローバ(Rover-1A、Rover-1B)は、小惑星表面に着陸し、自律機能による小惑星表面撮像およびホッピング移動に成功しました。このたび、2台のローバに名前をつけました。
Rover-1Aは「イブー(HIBOU)」、Rover-1Bは「アウル(OWL)」です。
[命名についての詳細はこちら]
2018年10月30日更新
[はやぶさ2プロジェクト]小型モニタカメラが“クール!”な画像を撮影
![[はやぶさ2プロジェクト]小型モニタカメラが“クール!”な画像を撮影](https://www.jaxa.jp/projects/sas/hayabusa2/images/topics_20181030_TD1R3_CAMH.jpg)
タッチダウン1リハーサル3(TD1-R3)において探査機がリュウグウ表面に近づいたときに、CAM-H(小型モニタカメラ)での撮影を試みました。CAM-Hは皆さまからいただきました寄附金により製作・搭載されたもので、探査機側面の一番下の縁付近に取り付けられています。サンプラホーンの先端が撮影できますが、その背景も撮影することができます。
2018年10月25日更新
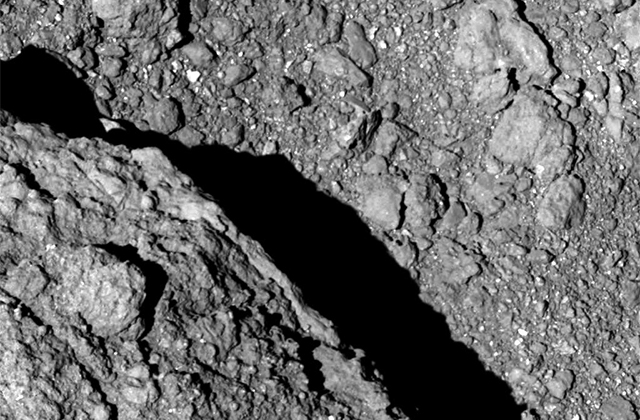
[はやぶさ2プロジェクト]リュウグウの最高解像度の画像(解像度更新:史上最高解像度)
![[はやぶさ2プロジェクト]リュウグウの最高解像度の画像(解像度更新:史上最高解像度)](https://www.jaxa.jp/projects/sas/hayabusa2/images/topics_20181025_hayabusa2.jpg)
2回目のタッチダウンリハーサル(TD1-R1-A)を10月14日〜16日に行いましたが、最低高度の22.3mに達した10月15日22:44(日本時間)の直前に、望遠の光学航法カメラでのリュウグウ表面撮影に成功しました(図1)。これは、これまでで最も高解像度の画像になります。
画像:望遠の光学航法カメラ(ONC-T)によって2018年10月15日、22:40 (日本時間)に撮影されたリュウグウ表面の様子。高度約42mからの撮影となる。
画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研
[続きはこちら]
2018年10月25日更新
[はやぶさ2プロジェクト]DPSにて「はやぶさ2」の特別セッションと記者会見を開催
DPSとは、Division for Planetary Sciences of the American Astronomical Societyというもので、米国天文学会の惑星科学部門のことです。この部門で行う会合のこともDPSと呼びますが、惑星の分野では世界最大の学会の1つになります。今年は、第50回目の会合( https://aas.org/meetings/dps50 )となりますが、10月21日~26日に米国テネシー州のノックスビルで開催されます。この会合で「はやぶさ2」の特別セッションが開催されることになりました。学会の1つのセッションが「はやぶさ2」だけの発表で行われることになります。「はやぶさ2」にとっては、このようなことは今回が初めてになります。さらに、学会の期間中に行われる記者会見でも「はやぶさ2」が取り上げられることになりました。
[続きはこちら]
2018年10月24日更新
[はやぶさ2プロジェクト]TD1-R3運用スケジュール
![[はやぶさ2プロジェクト]TD1-R3運用スケジュール](https://www.jaxa.jp/projects/sas/hayabusa2/images/topics_20181024_hayabusa2.jpg)
タッチダウン・リハーサルの3回目を10月23日から25日にかけて行います。今回のリハーサルの目的は、近距離での高度計測を行うLRF(レーザ・レンジ・ファインダ)による計測値を探査機の制御にフィードバックすることです。そして、条件が満たされれば、ターゲットマーカ(TM)の分離も行い、切り離したTMの追跡も試みます。これらのことを行うことで、約20mという低高度での航法誘導制御の精度を確認します。
[続きはこちら]
2018年10月14日更新
[はやぶさ2プロジェクト]タッチダウン運用のスケジュール変更について
![[はやぶさ2プロジェクト]タッチダウン運用のスケジュール変更について](https://www.jaxa.jp/projects/sas/hayabusa2/images/topics_20181014_hayabusa2.jpg)
小惑星リュウグウ近傍でのこれまでの探査機運用結果を踏まえて、本年(2018年)10月末に予定していましたタッチダウンを延期して、来年1月以降に行うことにしました。
2018年内の今後の主要な運用は次のようになります。
- 10月14日~15日:TD1-R1-A(2回目のTDリハーサルに相当)
- 10月24日~25日:TD1-R3(3回目のTDリハーサルに相当)
- 11月下旬~12月 :合運用
1回目のタッチダウンを行う時期につきましては、上記のTD1-R3までの結果を踏まえて、合運用期間中に検討する予定です。
[続きはこちら]
2018年10月5日更新
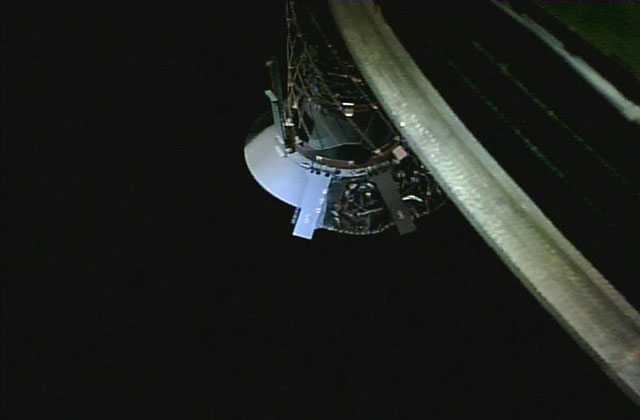
[はやぶさ2プロジェクト]探査機から分離していくMASCOTの撮影に成功!
![[はやぶさ2プロジェクト]探査機から分離していくMASCOTの撮影に成功!](https://www.jaxa.jp/projects/images/tn_topics_20181005_MSC_ONC.jpg)
10月3日に、ドイツ・フランスによって開発された小型着陸機MASCOTの分離運用を行い、無事にリュウグウ表面に届けることができました。その後、MASCOTはリュウグウ表面で科学データを取得し、そのデータは探査機経由でMASCOTチームに伝送されています。今後、MASCOTチームによって科学的な解析がなされるものと思います。
探査機からは、3つの光学航法カメラ(ONC-T、ONC-W1、ONC-W2)を用いて、分離されたMASCOTを撮影する試みを行いました。画像データを探査機から取得したところ、ONC-W1とONC-W2で撮影された画像にMASCOTが写っていることが確認されました。
[続きはこちら]
2018年9月27日更新
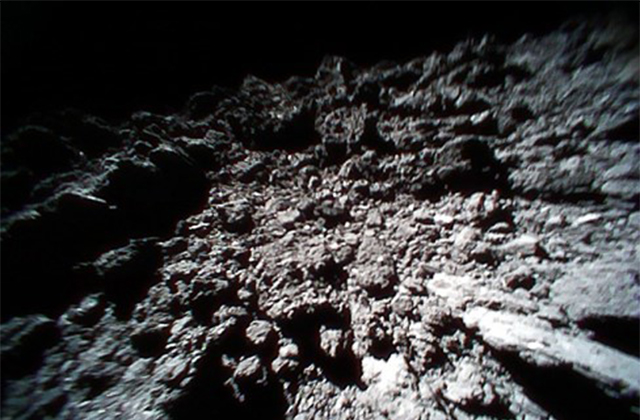
これまでで最高解像度のリュウグウ地表画像
はやぶさ2がMINERVA-II1の分離運用で降下した際に、望遠カメラONC-Tでは、これまでのリュウグウ表面の写真で最高解像度になる画像が撮られました。この画像を紹介します。
[続きはこちら]
2018年9月27日更新
MINERVA-II1が撮影した画像、第2弾!
2018年9月27日更新
リハーサル運用によるタッチダウン候補地点の確認
9月10日から12日にかけて行いましたタッチダウン1リハーサル1(TD1-R1)運用において、タッチダウン候補地点の確認を行いました。
[続きはこちら]
2018年9月27日更新
BOX-B運用で撮影されたリュウグウの画像
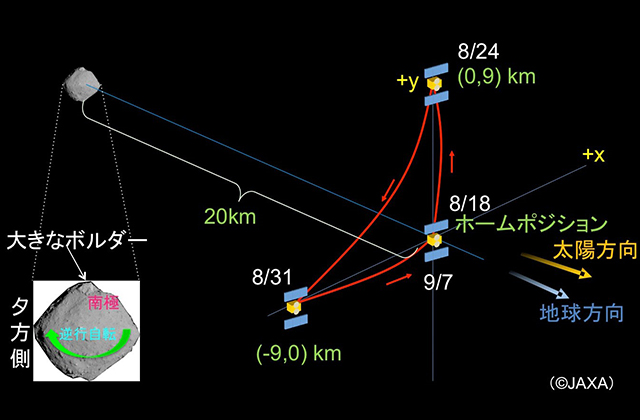
8月18日から9月7日にかけて、BOX-B運用というものを行いました。ここでは、BOX-B運用で撮影した画像をご紹介します。
[続きはこちら]
2018年9月22日更新
ミネルバII1、写真撮影・リュウグウ着地・ホップによる移動に成功!

9月21日に、「はやぶさ2」探査機から小型ローバ MINERVA-II1(ミネルバ・ツー・ワン)を分離しました(分離時刻は日本時間で13:06)。MINERVA-II1はRover-1AとRover-1Bの2機からなっていますが、2機とも小惑星リュウグウ表面に着地したことを確認しました。各ローバとも状態は正常で、撮影した写真や各種のデータを送ってきています。その写真等の解析で、ローバはリュウグウ表面を移動していることも確認できました。
MINERVA-II1の運用は今後も継続します。さらにデータを取得して、解析を進めて行く予定です。
[続きはこちら]
2018年9月19日更新
小型探査ローバMINERVA-II1
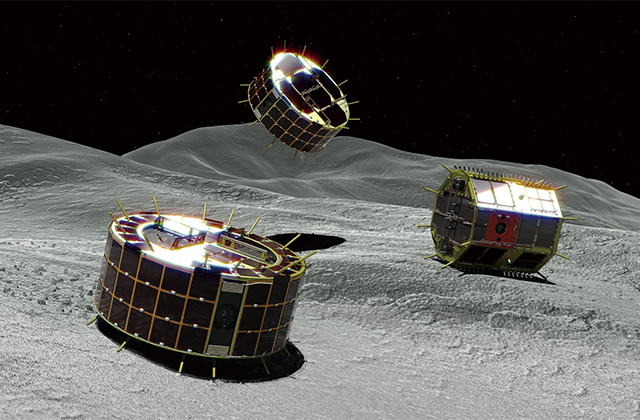
「MINERVA-II (MIcro Nano Experimental Robot Vehicle for Asteroid [the Second Generation])」は初代「はやぶさ」に搭載された探査ローバ「MINERVA」の後継機です。
「はやぶさ2」の底面には「MINERVA-II1」および「MINERVA-II2」の2つのコンテナが搭載されていて、「II1」には2機、「II2」には1機のローバが格納されています。9月に分離がおこなわれるのは「MINERVA-II1」の方です(「MINERVA-II2」の分離は来年に予定されています)。
[続きはこちら]
2018年9月15日更新
探査機の影と衝効果
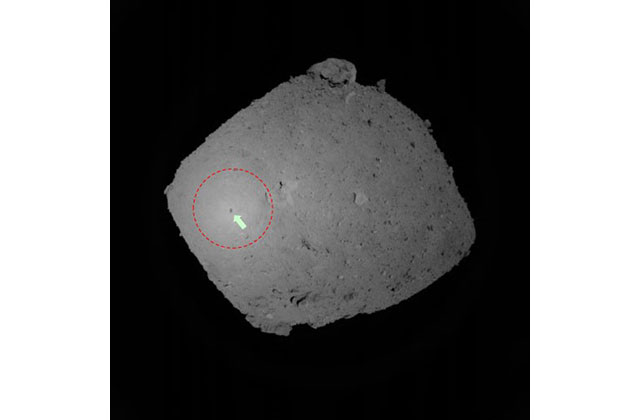
最初のタッチダウンに向けて1回目の運用リハーサルを9月10日から12日にかけて行いました。実際の運用では、高度約600mくらいで探査機は上昇してしまいましたが、降下中に広角の光学航法カメラ(ONC-W1)で航法目的に撮影をしていました画像をリアルタイムで公開しました。最後に撮影された画像を図に示します。これは、9月12日の12:40(日本時間)頃に、リュウグウ表面から約635mで撮影されたものです。
画像:2018年9月12日12:40(日本時間)頃にONC-W1によって撮影されたリュウグウ。リュウグウ表面からの距離は約635m。この画像では、上がリュウグウの南極になっており、地球とは逆向きに自転している。赤い丸で囲んだ部分が明るくなっているのが衝効果。また、矢印で示す黒い点は「はやぶさ2」の影である。
画像クレジット:JAXA
[続きはこちら]
2018年9月12日更新
タッチダウン1 リハーサル1(TD1-R1)の結果について
最初のタッチダウンに向けて1回目の運用リハーサルを9月10日から行っており、9月11日から探査機はリュウグウに向けて降下をしていました。本日(9月12日)、最低高度に向けて降下をしていましたが、高度約600mで探査機は自律的に降下を中止して上昇に転じました。理由は、リュウグウ表面の反射率が低いことにより、小惑星表面と探査機の間の距離を計測していたレーザ高度計(LIDAR)の計測が出来なかったことに起因すると考えられます。
[続きはこちら]
2018年9月11日更新
タッチダウン1 リハーサル1 航法画像のリアルタイム配信
2018年9月11日~9月12日に実施されるタッチダウン1 リハーサル1における航法用画像を掲載します。
リアルタイム配信は終了しました
- 回線の都合上、または、データ処理の関係上、画像が乱れる場合がありますがご了承ください。
- 時刻はUTC(世界時)で書かれています。日本時間(JST)にするには、9時間を足してください。
画像:地上受信時刻 UTC 2018-09-12 03:58
画像クレジット:JAXA
[続きはこちら]
2018年9月11日更新
タッチダウン1 リハーサル1(TD1-R1)のスケジュール
1回目のタッチダウンを10月下旬に計画していますが、それに向けた1回目のリハーサルを9月10日から12日にかけて行います。「タッチダウン1 リハーサル1」略してTD1-R1と呼んでいます。TD1-R1では、リュウグウ表面からの高度が40m以下まで接近します。そして、着地はせずに上昇します。今回のリハーサルの目的は、タッチダウンを行うための探査機運用について確認をすることと、リュウグウ表面を至近距離から撮影することでタッチダウン候補地点の安全性を確認することになります。
[続きはこちら]
2018年9月5日更新
小型モニタカメラで撮影したサンプラホーン
「はやぶさ2」には、多くの皆さまからいただきましたご寄付により製作・搭載した小型モニタカメラ(CAM-H、小型モニタカメラヘッドとも呼ぶ)が搭載されています。
このカメラを使って、8月14日にサンプラホーンの写真を撮影してみました。
画像:2018年8月14日に小型モニタカメラで撮影したサンプラホーン(画像クレジット:JAXA)
[続きはこちら]
2018年8月31日更新
「はやぶさ2」レーザ高度計一か月の成果
「はやぶさ2」搭載のレーザ高度計(LIDAR)が、小惑星リュウグウとの距離を初めて観測してからおよそ一か月が経ちました。図は、この間に取得されたデータを解析し、レーザがリュウグウ表面で反射した点を示したものです。通常、探査機の姿勢はレーザ高度計が赤道付近を向くように制御されていますが、この姿勢を自転軸に沿って動かす(姿勢スキャン)運用をこれまでに2回行いました。
画像クレジット: 国立天文台, JAXA, 千葉工大, 会津大, 日本大, 大阪大
[続きはこちら]
2018年8月31日更新
TIRによるリュウグウのサーモグラフィ
「はやぶさ2」搭載の中間赤外カメラ(TIR)による観測を行っています。図は、リュウグウ上空20km(ホームポジション)からTIRで撮像したサーモグラフィです。
1自転分撮像しましたが、赤い色が温度の高い地域を表しており、特徴的な地域の温度変化を捉えることができています。熱画像の特徴は、可視画像だと日陰でみえない領域まで見えるので、全体形状がよく分かることや、大きなクレータや巨大な岩塊など特徴的な地形も温度の違いとして見えることです。
画像:中間赤外カメラ(TIR)によって観測された小惑星リュウグウ。撮像日時は2018年6月30日16:02~23:45(JST)で、8分毎に1自転分撮影した。リュウグウ上空20 km(ホームポジション)からの撮影で、1ピクセルあたり約20mである。また、このときの太陽距離は0.987au(1au:太陽と地球の年平均距離で約1.496億km)。
画像クレジット:JAXA/足利大学/立教大学/千葉工業大学/会津大学/北海道教育大学/北海道北見北斗高校/産業技術総合研究所/国立環境研究所/東京大学/ドイツ航空宇宙センター/マックスプランク研究所/スターリング大学
[続きはこちら]
2018年8月31日更新
小惑星リュウグウの表面に多くある岩塊
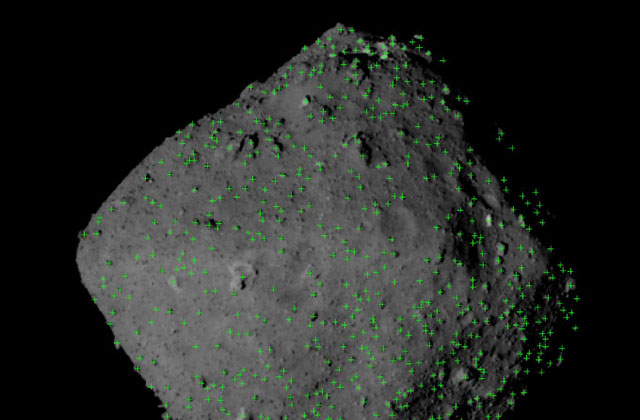
小惑星リュウグウの表面には、予想以上に多くの岩塊があることが分かりました。小惑星イトカワでも多くの岩塊があったのですが、リュウグウの方が、面積あたりでもその個数が多いかもしれません。2018年6月30日にホームポジション(リュウグウから約20km離れたところ)から撮影した画像に基づいて見かけ上8mから10m以上の岩塊に緑色の印をつけたものが図です。
画像:リュウグウ表面上の岩塊の分布(正面の経度300度)。緑色のマークは見かけ上8mから10m以上の岩塊を示す。この図では、小惑星の北極が上向きになっている。
画像クレジット:近畿大/JAXA/東京大/高知大/立教大/名古屋大/千葉工大/明治大/会津大/産総研
[続きはこちら]
2018年8月31日更新
Box-C運用で撮影したリュウグウの画像
2018年8月29日更新
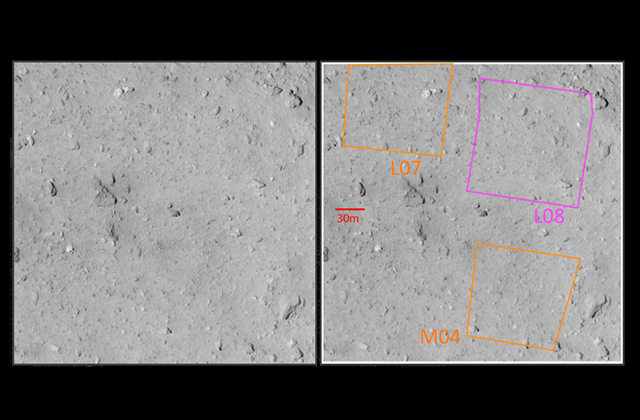
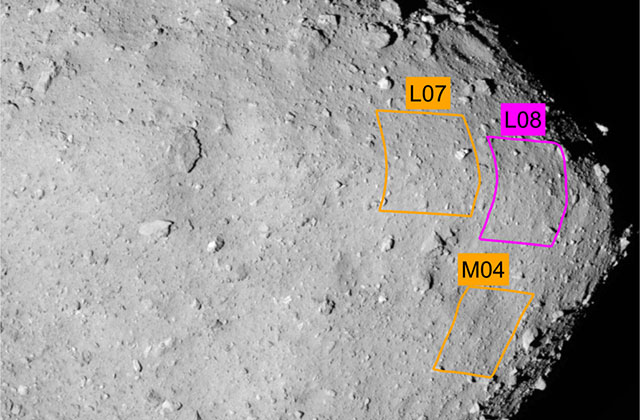
着地候補地点の決定!
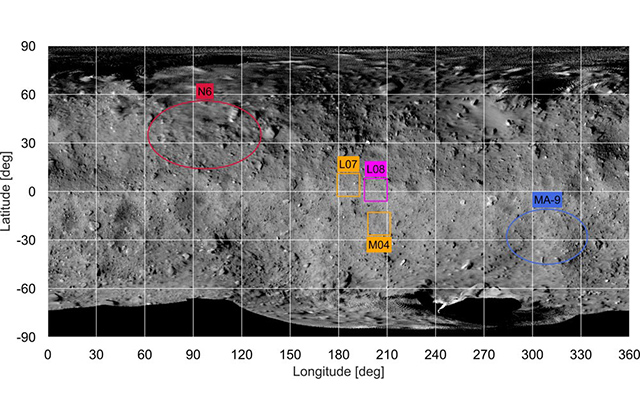
2018年8月17日に着陸地点選定(LSS:Landing Site Selection)会議が開催され、タッチダウン、MASCOT、MINERVA-II-1の着地候補地点が決定されました。本記事では、着地候補地点と予定日をご紹介します。選定の詳細はまた機会をあらためてご紹介する予定です。
画像:リュウグウの地図に記された候補地点
画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研
[続きはこちら]
2018年8月7日更新
高度1kmから撮影したリュウグウ
小惑星探査機「はやぶさ2」は、6月27日にリュウグウに到着してから、7月20-21日にはBOX-C運用として高度6kmくらいまで降下し、8月1日には高度5kmほどの中高度運用を行いました。そして、8月6日からは、リュウグウの重力を計測するために、3回目の降下運用を行いました。
重力計測運用では、なるべく探査機の軌道・姿勢制御をせずにリュウグウの引力にまかせて探査機を運動させることを行います(自由落下、自由上昇)。そのようにしておいて探査機の運動を正確に把握すると、リュウグウからどのくらいの強さの引力を受けているのかが分かるのです。
探査機は、8月6日の11:00前(日本時間)にホームポジション(リュウグウからの距離が20km)から降下を開始しました。同日の20:30くらいには高度6000mに達し、そこから自由落下状態となりました。そして、8月7日の8:10頃に最低高度となる851mまで接近し、そこでスラスタを噴いて上昇に転じました。
画像:高度約1250mから望遠の光学航法カメラ(ONC-T)で撮影したリュウグウの表面。2018年8月7日、7:37頃(日本時間)に撮影。
画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研
2018年7月31日更新
リュウグウの高解像度立体視画像
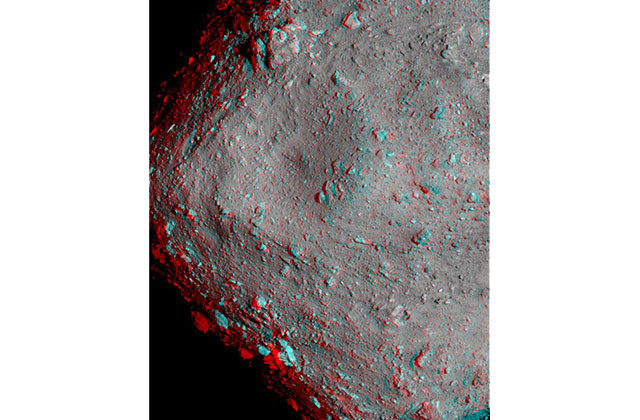
「はやぶさ2」が小惑星リュウグウ(Ryugu)に高度約6kmまで近づいた時に、リュウグウの自転に伴って、小惑星を見る角度が次第に変わる画像を撮影いたしました。
以前に撮影した画像と、もう一枚違う角度からの画像を使って、立体視ができる赤青の合成画像を新しく作成しております。
赤青立体メガネ(右目が青、左目が赤)で見ると、リュウグウの全体形状と表面の地形が立体的に把握できます。
画像の中央のリュウグウの赤道に沿った張り出しや、表面のあちこちにある大小さまざまな岩塊(ボルダー)の作る凸凹、クレーターのような円形の窪みなど、様々な地形がリュウグウの表面にあることがわかります。
画像:高度約6kmから望遠の光学航法カメラ(ONC-T)によって撮影した画像から作成した、リュウグウの赤青立体視画像。2018年7月20日撮影。
画像クレジット:JAXA, 会津大, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 産総研
2018年7月25日更新
高度約6kmから撮影したリュウグウ
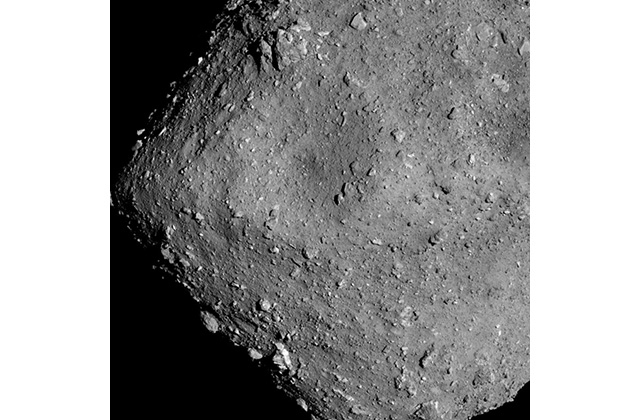
「はやぶさ2」は、6月27日に小惑星リュウグウ(Ryugu)に到着しましたが、その後、小惑星から約20km離れた地点(ホームポジション)に滞在して、リュウグウの観測を続けていました。高度20kmでホバリングをしていたわけです。そして、7月16日の週には、このホバリングの高度を下げるという運用を行いました。最終的には、高度が6kmを切るくらいまで下がりました。
これまでホームポジションから撮影されていた画像と比べると、解像度が約3.4倍上がっており、1画素が約60cmに対応します。画像中央付近にリュウグウ表面で最大のクレーターが写されていますが、“すり鉢”のような形をしていることがよく分かります。また、リュウグウの表面が非常に多数の岩塊(ボルダー)に覆われていることも分かります。この写真は、着陸地点を選ぶ上でも重要な情報となります。
画像:高度約6kmから撮影したリュウグウ。2018年7月20日、16時頃(日本時間)に望遠の光学航法カメラ(ONC-T)によって撮影。
画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研
2018年7月17日更新
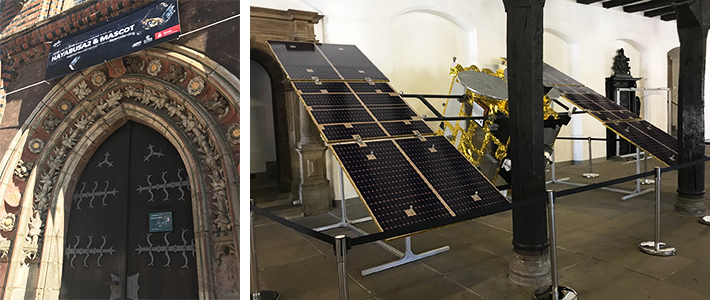
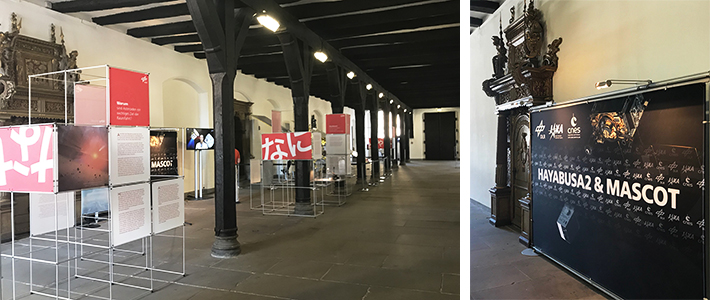
ドイツ・ブレーメン市庁舎で、小惑星探査機「はやぶさ2」と小型着陸機MASCOTの特別展示を実施(7月10日~10月14日)
小惑星探査機「はやぶさ2」とDLR(ドイツ航空宇宙センター)とCNES(フランス国立宇宙研究センター)が開発した「はやぶさ2」搭載の小型着陸機MASCOTの特別展示が、7月10日(火)から10月14日(日)まで、世界遺産でもあるドイツ・ブレーメン市庁舎で行われています。
ブレーメン市は、宇宙や科学の研究が盛んなところで、今年10月には世界最大の国際宇宙会議(IAC:International Astronautical Congress)の開催を予定しており、チームドイツとしてDLR他、宇宙関係企業により宇宙産業の活性化に積極的に取り組んでいます。
機会がありましたら、歴史的価値のある市庁舎内に設置された「はやぶさ2」とMASCOTの模型および展示物をぜひご覧下さい。
小惑星探査機「はやぶさ2」は、6月27日(水)午前9時35分(日本時間)に、小惑星リュウグウに到着し、現在は小惑星リュウグウから20km離れた「ホームポジション」で今後の運用に備えた様々な機能確認を行っています。
小型着陸機MASCOTは、2018年10月ごろ小惑星リュウグウに降ろされ、4つの観測装置でリュウグウ表面の調査を予定しています。
2018年7月11日更新
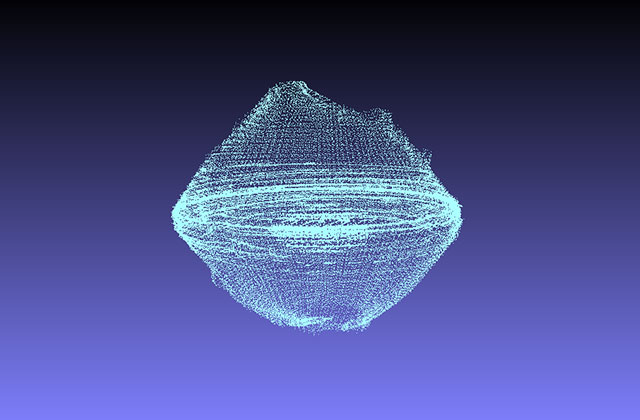
リュウグウの形状モデル初期バージョンが完成
「はやぶさ2」プロジェクトの形状モデルチームでは、ONC-T(望遠の光学航法カメラ)で撮影した画像などをもとに、リュウグウの三次元形状を計測して、形状モデルを作成する作業を進めています。
リュウグウの形状は、この小惑星の成り立ちを考える上で基本的な情報の一つであるとともに、今後の探査機の運用のためにも重要です。
画像:会津大によるリュウグウの形状モデル。
画像クレジット:会津大, 神戸大(形状モデル作成), Auburn University(動画作成), JAXA
2018年7月11日更新
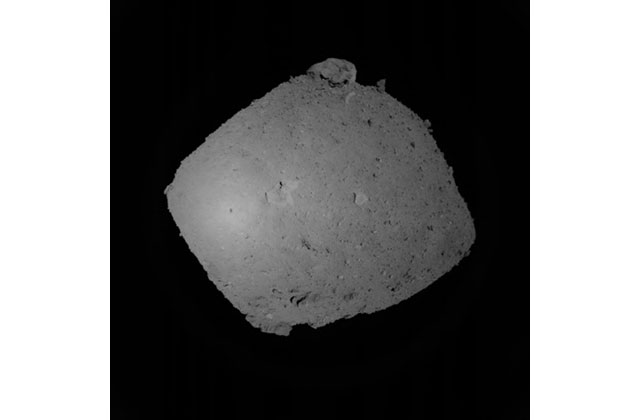
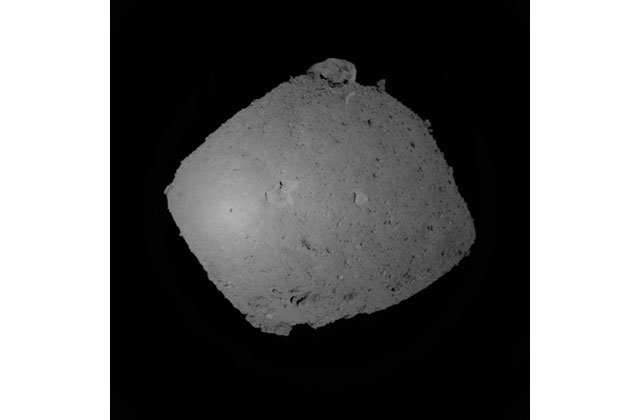
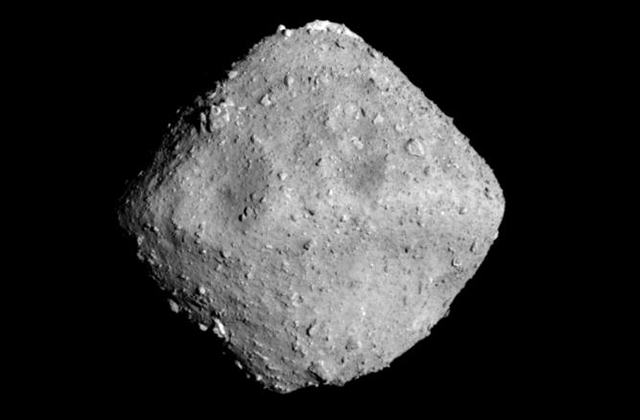
ホームポジションから見たリュウグウ
小惑星リュウグウから20㎞離れた「ホームポジション」に到着したはやぶさ2探査機は、今後の運用に備えた様々な機能確認を行ってきました。
その中でリハーサル観測として撮られた画像をご覧ください。
画像: ONC-Tによって距離約20kmから撮影されたリュウグウ。2018年6月30日23:13(日本時間)頃の撮影。
画像クレジット:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研
2018年6月29日更新
リュウグウ到着!
2018年6月27日(水)、午前9時35分(日本時間)、「はやぶさ2」が目的の小惑星リュウグウに到着しました。
2014年12月3日に種子島宇宙センターから打ち上げられてから1302日目の到着です。
イオンエンジンの運用が終わった2018年6月3日から、小惑星接近誘導が開始されました。光学電波複合航法により、正確に小惑星を目指していきます。途中、探査機の速度制御のための化学エンジン(スラスタ)の噴射(TCM:Trajectory Correction Maneuver)を9回行いましたが、第10回目のTCMを上記の時刻に行いました。その結果、リュウグウに対する相対速度が1cm/s以下になったことが確認され、到着と判断されました。
「はやぶさ2」は、これからしばらくの間はリュウグウの近くに留まり、観測したり、ランダー・ローバーを降ろしたり、タッチダウンしたりインパクタの実験を行ったりします。いろいろと難しい運用や長時間連続運用も行うことになりますが、リュウグウを徹底的に調べていく予定です。

リュウグウ到着記念の集合写真(2018年6月27日)
2018年6月14日更新
920kmの距離から見たリュウグウ
「はやぶさ2」は順調にリュウグウへ近づいています。2018年6月13日に、約920kmの距離からONC-T(望遠の光学航法カメラ)で撮影したリュウグウを図に示します。画像の中心に明るく輝いている天体がリュウグウです。 6月6日 、 6月10日 、そして今回と、リュウグウが移動している様子が分かります。リュウグウの等級は約-6.6等になりました。
図:2018年6月13日に、ONC-Tによって撮影されたリュウグウ
2018年6月11日更新
1500㎞の距離から見たリュウグウ
「はやぶさ2」は光学電波複合航法によって小惑星接近を続けています。
2018年6月10日に、約1500kmの距離からONC-T(望遠の光学航法カメラ)でリュウグウを撮影しました。画像の中心に明るく輝いている天体がリュウグウです。6月6日に撮影した画像と比較すると、リュウグウが見えている位置が異なっていることが分かります。
図:2018年6月10日に、ONC-Tによって撮影されたリュウグウ
2018年6月11日更新
LIDARを約2年ぶりに立ち上げました
「はやぶさ2」に搭載されているレーザ高度計(LIDAR)に約2年ぶりに電源を入れて、正常に動作するかの確認(健全性確認)を行いました。
LIDARは、照射したレーザがターゲット面で散乱されて帰ってくるまでの時間から、ターゲットまでの距離を測る装置です。この距離から探査機の位置を確認したり、天体表面の凹凸を計測したり、ターゲットの反射率を求めたりします。宇宙空間では光を返してくれるターゲットがいないため、クルージング中はLIDARの電源は切られていました。
「はやぶさ2」は日々リュウグウに近づいて行っています。まもなく、LIDARが距離を測れるようになり、データが下りてくる日が期待されます。
2018年5月15日更新
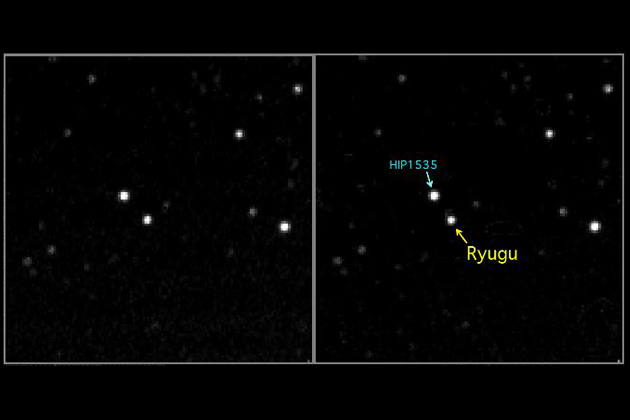
スタートラッカによるリュウグウの撮影に成功!
「はやぶさ2」はリュウグウ到着に向けてイオンエンジンの運用をおこなっていますが、5月11日、イオンエンジンをいったん停止して、スタートラッカによってリュウグウの撮影を行いました。これは、探査機からリュウグウの方向を観測することによって光学航法を行うためです。
撮影は、5月11日から14日にかけてほぼ1日おきに3回行い、1回の撮影では、数時間の間に3枚の画像を取得しました。撮影はすべて成功し、写っていたリュウグウの位置を正確に計測しました。
このデータを使って、リュウグウと「はやぶさ2」の軌道を正確に求める作業を開始しています。
2018年5月2日更新
「はやぶさ2」プロジェクトメンバー、第50回市村賞を受賞

第50回市村賞の市村学術賞・貢献賞を、「はやぶさ2」プロジェクトのメンバーである津田雄一プロジェクトマネージャ、大野剛研究開発員、三桝裕也研究開発員が受賞しました。
受賞した研究テーマは「ソーラーセイル技術を用いた無燃料姿勢制御の実現」です。
写真は、2018年4月16日に帝国ホテルにて行われた授賞式の模様です。
※市村賞:公益財団法人市村清新技術財団が、産業分野や学術分野の発展・進展に貢献・功績のあった技術研究者・グループに贈呈している賞です。市村産業賞と市村学術賞がありますが、今回受賞しました市村学術賞とは、「大学ならびに研究機関で行われた研究のうち、学術分野の進展に貢献し、実用化の可能性のある研究に功績のあった技術研究者またはグループに贈呈」されるものです。
2018年5月2日更新
「はや2NOW」公開
小惑星探査機「はやぶさ2」は、現在、小惑星リュウグウ(Ryugu)到着の最終準備段階に移行しています。
「はやぶさ2」とは、地上局にある大きなアンテナを用いて電波で通信しています。その状況がリアルタイムでわかるウェブコンテンツ「はや2NOW(Haya2NOW)」が出来ました。
ご注意:
「はや2NOW」は広報用のウェブコンテンツです。探査機が正常でも、お使いのウェブブラウザの設定やネットワークの状況によっては、正しく表示されないことがあるかもしれません。また、システムのメンテナンス等のため一時停止する場合があります。そのような場合にはしばらく時間をおいてからアクセスしてみてください。
2018年3月1日更新
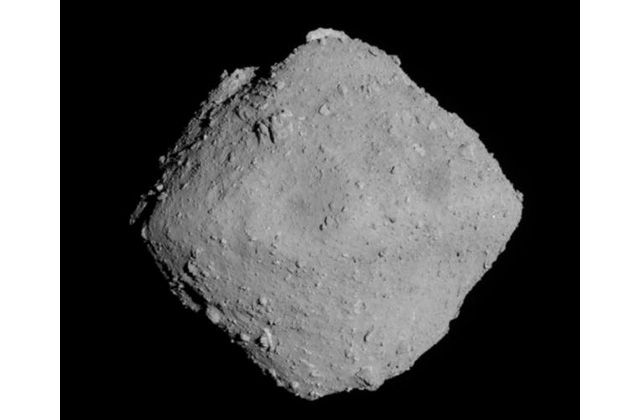
「はやぶさ2」がリュウグウの撮影に成功しました
2018年2月26日、「はやぶさ2」搭載のONC-T(望遠の光学航法カメラ)により、目的地である小惑星リュウグウ(Ryugu)の撮影に成功しました。撮影は、日本時間で正午から翌27日の午前9時まで行われ、300枚ほどの撮影がなされました。
「はやぶさ2」は現在、イオンエンジンの運用を行い、予定通りの軌道上を飛行しています。
2016年3月31日更新
「はやぶさ2」ミッションロゴの色が変わりました

「はやぶさ2」打ち上げ後1年間が経過しTransfer(※)フェーズに移行した節目に、これまでのミッションロゴの色を変えてみました。
描かれているイラストは変わりませんが、小惑星の名称を仮符号の1999 JU3からRYUGUとしてあります。また「はやぶさ2」が、地球近傍軌道から離れて太陽系空間を深く突き進むイメージを青系統に託しました。「太陽系」という大海原を航海していく「はやぶさ2」を、これからも応援してください。
※地球軌道からリュウグウの軌道に移る間の軌道のこと
2015年12月14日更新
「はやぶさ2」地球スイングバイ成功 進路は小惑星リュウグウ!

12月3日に地球スイングバイを行った「はやぶさ2」が、小惑星「Ryugu」(リュウグウ)を目的とする軌道に入れたことが確認できました。
「はやぶさ2」は地球スイングバイ後、搭載している光学航法カメラで地球を撮影しました。オーストラリア大陸や南極大陸が見えています。ひまわりなどの気象衛星では南極点付近を撮影することは難しく、今回は貴重な写真を撮ることができました。
2015年12月3日更新
「はやぶさ2」地球スイングバイを実施

「はやぶさ2」は12月3日(木)の夕方から夜にかけて地球スイングバイ(地球に接近し、地球の引力を利用した軌道制御)を実施し、19時08分(日本時間)に地球に最接近、ハワイ諸島付近の太平洋上空約3,090kmを通過しました。
探査機の状態は正常であることを確認しました。目標とする軌道に入れたかどうかの確認には1週間程度かかる見込みです。
2015年11月27日更新
「はやぶさ2」地球と月を撮影

スイングバイのために地球に接近している「はやぶさ2」が、2015年11月26日の12時46分(日本時間)に、搭載されている光学航法望遠カメラ(ONC-T)により地球と月を同時に撮影しました。右に地球が、左に月が見えます。
ONC-Tは、小惑星「Ryugu」観測用に複数のフィルターを持っていますが、そのうち3つのフィルターを使って撮像したデータをR(赤)、G(緑)、B(青)とみなして、疑似カラー画像を作成しました。撮影を行ったとき、「はやぶさ2」と地球の距離は約300万kmでした。
※本画像はトリミングしております。元画像はプロジェクトサイトをご覧ください。
2015年11月2日更新
いざ地球スイングバイ!「はやぶさ2」への応援メッセージ募集

2014年12月3日、宇宙へ旅だった小惑星探査機「はやぶさ2」が、2015年12月3日(木)に地球に接近し、地球の引力を利用した軌道制御(地球スイングバイ)を行います。地球に最も近づく時刻は19時7分ごろ(日本時間)です。
スイングバイ後、いよいよ小惑星「Ryugu」(リュウグウ)を目指す「はやぶさ2」を一緒に応援してみませんか。JAXAでは、「はやぶさ2」、プロジェクト関係者、ミッションへの応援メッセージを募集しています。みなさんからのご投稿お待ちしております!
2015年10月5日更新
「はやぶさ2」が目指す小惑星の名称が「Ryugu」に決定!

小惑星探査機「はやぶさ2」が目指す小惑星1999 JU3の名称が「Ryugu」(リュウグウ)に決定しました。
「浦島太郎」の物語で、浦島太郎が玉手箱を持ち帰るということが、「はやぶさ2」が小惑星のサンプルが入ったカプセルを持ち帰ることと重なること、などが選定理由となり、応募総数7,336件の中から、選考委員会により選定されました。
選考された名称案は、小惑星1999 JU3の発見者である米国のLINEAR(リニア)チームより国際天文学連合に提案され、Minor Planet Centerの小惑星リストへの掲載をもって決定となりました。たくさんのご応募ありがとうございました。
2015年2月3日更新
探査機は“万全の状態”~順調に進む初期機能確認~

2014年12月3日(JST)に打ち上げた「はやぶさ2」は現在、初期機能確認期間にあります。1月末までに、搭載各機器及び地上システムの基本的な動作・機能の確認を順次行いました。
確認した動作・機能の中で主なトピックスをご紹介します。
- イオンエンジン試運転(1台ずつ)
イオンエンジン4台について、1台ずつ稼働を確認しました。また軌道上で初めて推力(7-10mN)が発生しました。 - Ka帯通信機器による通信確立(2015年1月5-10日)
探査機と NASA DSN 各局との間で通信に成功し、日本の探査機として初めて深宇宙Ka帯通信が確立されました。Ka帯通信は、探査機が小惑星近傍滞在ミッションを行う際の観測データ伝送に使用されます。 - イオンエンジン24時間連続自律運転を達成
イオンエンジン2台、3台それぞれによる長時間自律運転(※1)試験を実施し、24時間連続運転を達成しました。
最大推力も計画通り約28mN発生していることが確認できました。
現在、探査機は万全の状態にあります。
「はやぶさ2」は引き続き複数機器の連係動作等の機能確認を実施した後、3月頃から巡航運転フェーズ(※2)に入る予定です。
※1 地上からの指令がなくても自動的に制御を行って運転すること
※2 イオンエンジン噴射による加速と軌道制御を行い、小惑星に向けた本格的な航行運転を行うモード